Publications
Welcome to my collection of robotics research publications. My work focuses on mechanically adaptive robotics, optimal control, actuator design, and the theory of human performance augmentation—pushing the boundaries of intelligent systems and automation. Through peer-reviewed articles, conference papers, and patents, I share insights into the challenges and breakthroughs driving robot autonomy and adaptive technology. Explore my latest research and discover how these innovations are shaping the future of robotics.

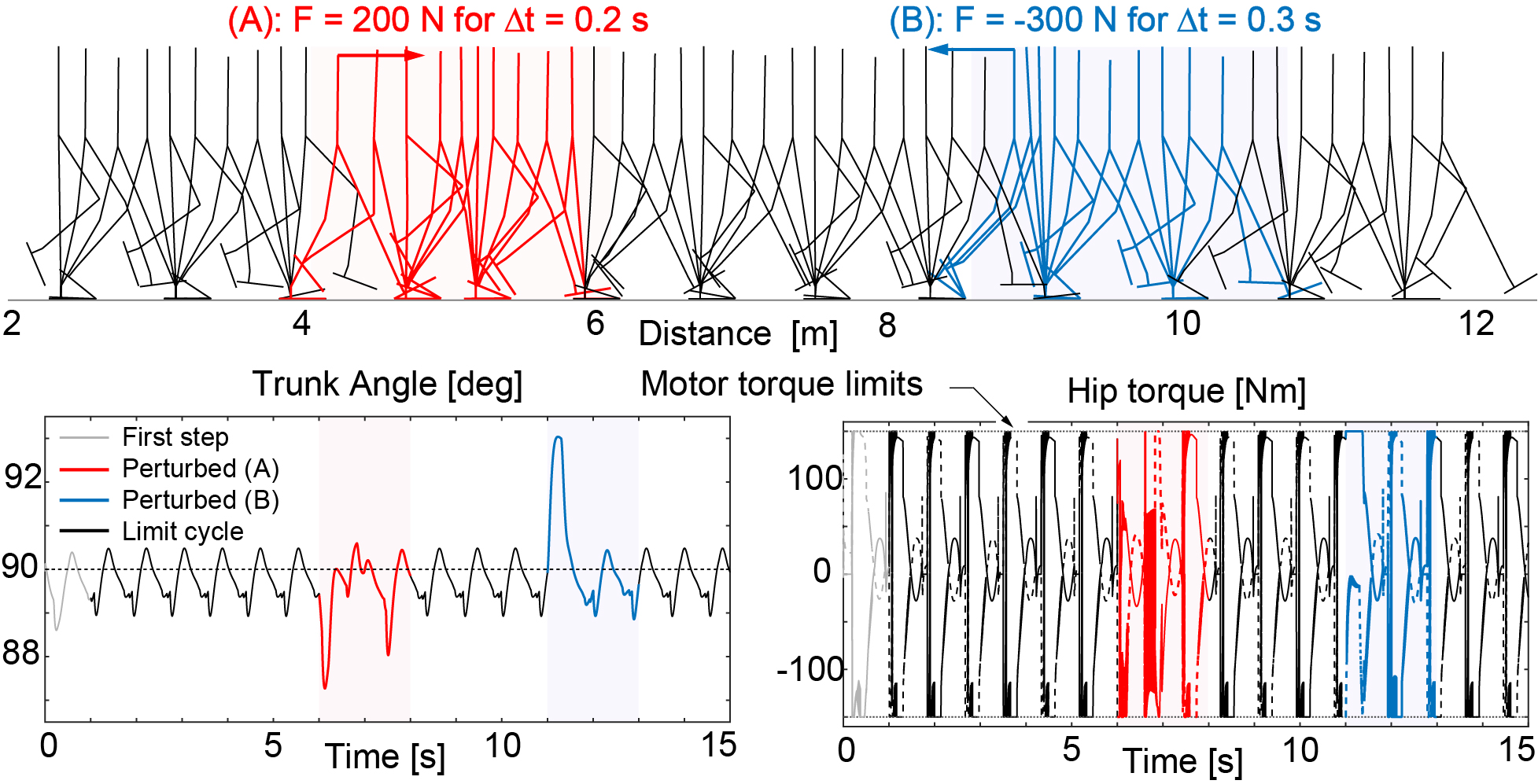
Multiphase and Multivariable Linear Controllers that Account for the Joint Torques in Normal Human Walking
E.S. Altinkaynak and D.J. Braun, Multiphase and Multivariable Linear Controllers that Account for the Joint Torques in Normal Human Walking, IEEE Transactions on Biomedical Engineering, 2019. This paper investigates how human walking mechanics can be represented using a small number of sequentially composed multivariable linear controllers. By…
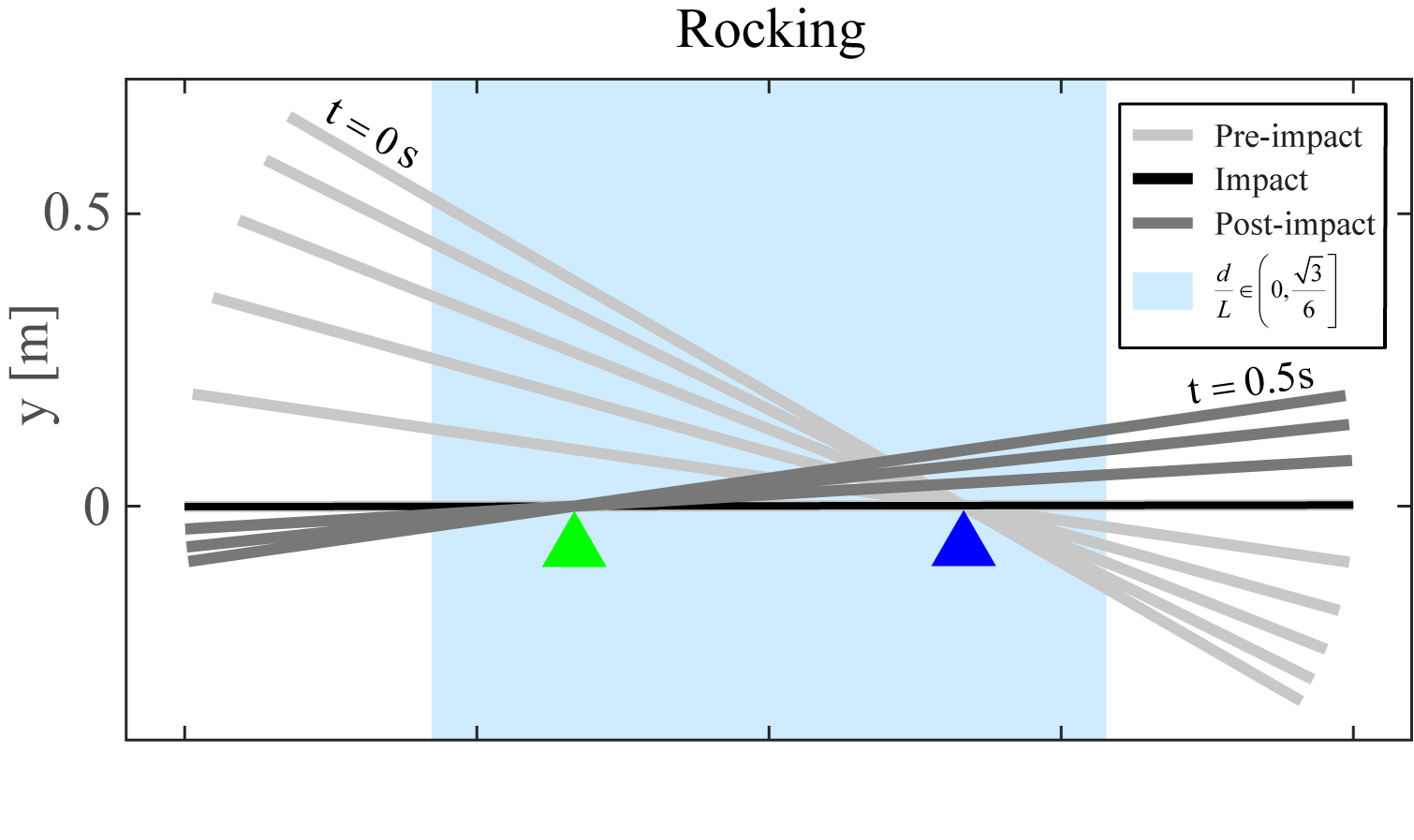
Algorithmic Resolution of Multiple Impacts in Non-smooth Mechanical Systems with Switching Constraints
Y. Li, H. Yu, and D.J. Braun, Algorithmic Resolution of Multiple Impacts in Non-smooth Mechanical Systems with Switching Constraints, IEEE International Conference on Robotics and Automation, Montreal, CA, pp. 7639-7645, May 2019. This paper presents a differential–algebraic formulation for modeling non-smooth robot dynamics involving switching constraints and…
Constrained Feedback Control by Prioritized Multi-objective Optimization
L. Li and D.J. Braun, Constrained Feedback Control by Prioritized Multi-objective Optimization, IEEE International Conference on Robotics and Automation, Montreal, CA, pp. 9496-9501, May 2019. This paper introduces a feedback control framework based on prioritized multi-objective optimization that rigorously handles input saturation constraints. Unlike traditional approaches, the method…
A Phase-Invariant Linear Torque-Angle-Velocity Relation Hidden in the Human Walking Data
E.S. Altinkaynak and D.J. Braun, A Phase-Invariant Linear Torque-Angle-Velocity Relation Hidden in the Human Walking Data, vol. 27, no. 4, pp. 702-711, IEEE Transactions on Neural Systems & Rehabilitation Engineering, 2019. This paper shows that the complex dynamics of human walking can be captured with a single…
Enhancing Mobility with Quasi-passive Variable Stiffness Exoskeletons
A. Sutrisno and D.J. Braun, Enhancing Mobility with Quasi-passive Variable Stiffness Exoskeletons, IEEE Transactions on Neural Systems & Rehabilitation Engineering, vol. 27, no. 3, pp. 487-496, 2019. Highlighted research by IEEE Transactions on Neural Systems & Rehabilitation Engineering. This paper introduces a quasi-passive variable stiffness exoskeleton designed…
Reinforcement Learning for a Class of Continuous-time Input Constrained Optimal Control Problems
F. A. Yaghmaie and D.J. Braun, Reinforcement Learning for a Class of Continuous-time Input Constrained Optimal Control Problems, Automatica, vol. 99, pp. 221-227, 2019. This paper develops a reinforcement learning framework for solving a class of continuous-time optimal control problems with input constraints. By relaxing the usual…
Efficiently Computable Constrained Optimal Feedback Controllers
Y. Chen, L. Roveda and D.J. Braun, Efficiently Computable Constrained Optimal Feedback Controllers, IEEE Robotics and Automation Letters, vol. 4, no. 1, pp. 121-128, 2018. This paper introduces two locally optimal feedback controllers designed for real-time implementation of constrained optimal control. Unlike conventional approaches that require extensive…
Positive-Negative Stiffness Actuators
D.J. Braun, V. Chalvet and A. Dahiya, Positive-Negative Stiffness Actuators, IEEE Transactions on Robotics, vol. 35, no. 1, pp. 162-173, 2018. This paper introduces a compliant actuator that combines tunable positive stiffness with passive negative stiffness. Unlike conventional variable stiffness actuators that require two motors or complex closed-loop…
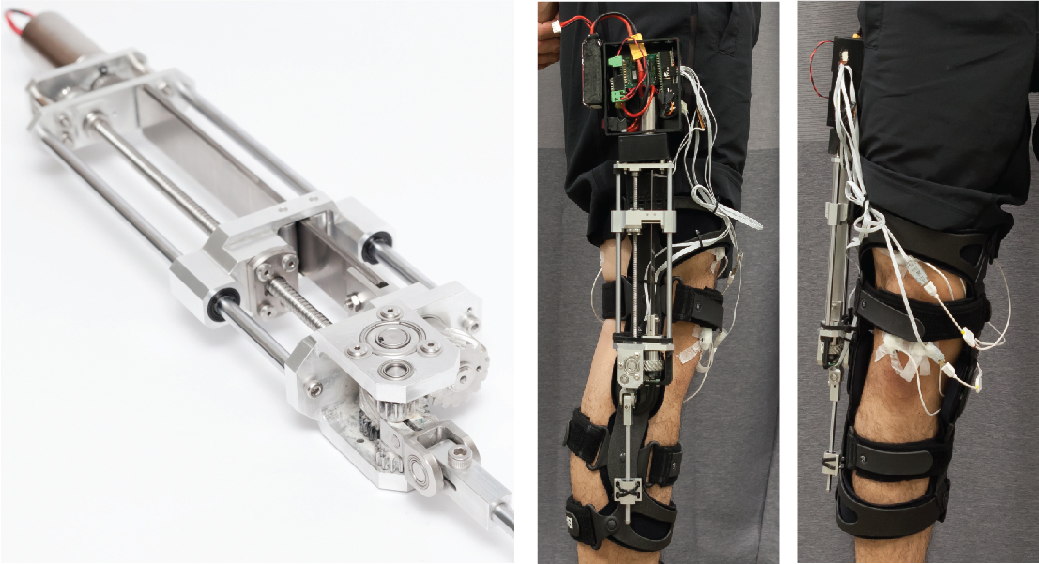
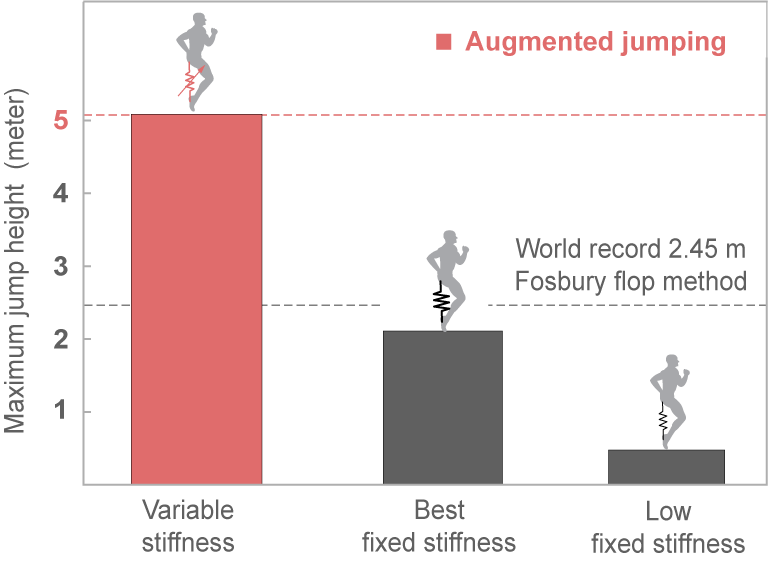
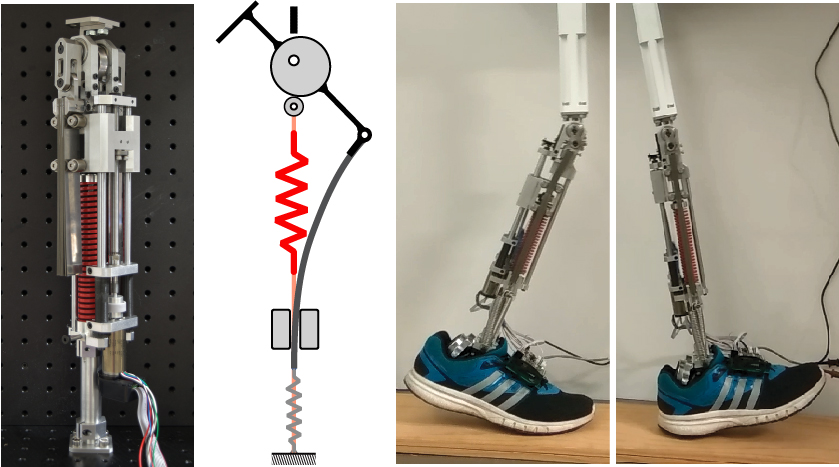
Stiffness Modulator: A Novel Actuator for Human Augmentation
H.-F. Lau, A. Sutrisno, T.-H. Chong, D.J. Braun, Stiffness Modulator: A Novel Actuator for Human Augmentation, IEEE International Conference on Robotics and Automation, pp. 7742-7748, 2018. This paper introduces a compact and lightweight stiffness modulator that provides stiffness adjustment without performing deliberate mechanical work. Designed for human…
Algorithmic Design of Low Power Variable Stiffness Mechanisms
V. Chalvet and D.J. Braun, Algorithmic Design of Low Power Variable Stiffness Mechanisms, IEEE Transactions on Robotics, vol. 33, no. 6, pp. 1508-1515, 2017. This paper presents an optimization-based framework for designing compliant mechanisms that enable low-power stiffness adaptation. The approach formulates the design process as a constrained…
Analytical Conditions for the Design of Variable Stiffness Mechanisms
C. Tze-Hao, V. Chalvet and D.J. Braun, Analytical Conditions for the Design of Variable Stiffness Mechanisms, IEEE International Conference on Robotics and Automation, Singapore, SG, pp. 1241-1247, May 2017. This paper presents an analytical framework for designing variable stiffness mechanisms based on a general model of potential…
Efficiently Tuneable Positive-Negative Stiffness Actuator
A. Dahiya and D.J. Braun, Efficiently Tunable Positive-Negative Stiffness Actuator, IEEE International Conference on Robotics and Automation, Singapore, SG, pp. 1235-1240, May 2017. This paper introduces a compliant actuator design that achieves both equilibrium position control and stiffness modulation using a single motor unit. The actuator combines a…