Publications
Welcome to my collection of robotics research publications. My work focuses on mechanically adaptive robotics, optimal control, actuator design, and the theory of human performance augmentation—pushing the boundaries of intelligent systems and automation. Through peer-reviewed articles, conference papers, and patents, I share insights into the challenges and breakthroughs driving robot autonomy and adaptive technology. Explore my latest research and discover how these innovations are shaping the future of robotics.
Data-Driven Iterative Optimal Control for Switched Dynamical Systems
Y. Chen, Y. Li, and D.J. Braun, Data-Driven Iterative Optimal Control for Switched Dynamical Systems, IEEE Robotics and Automation Letters, vol. 8, no. 1, pp. 296-303, 2023. This article presents a data-driven algorithm for solving nonlinear optimal control problems with input constraints and switched dynamics.…
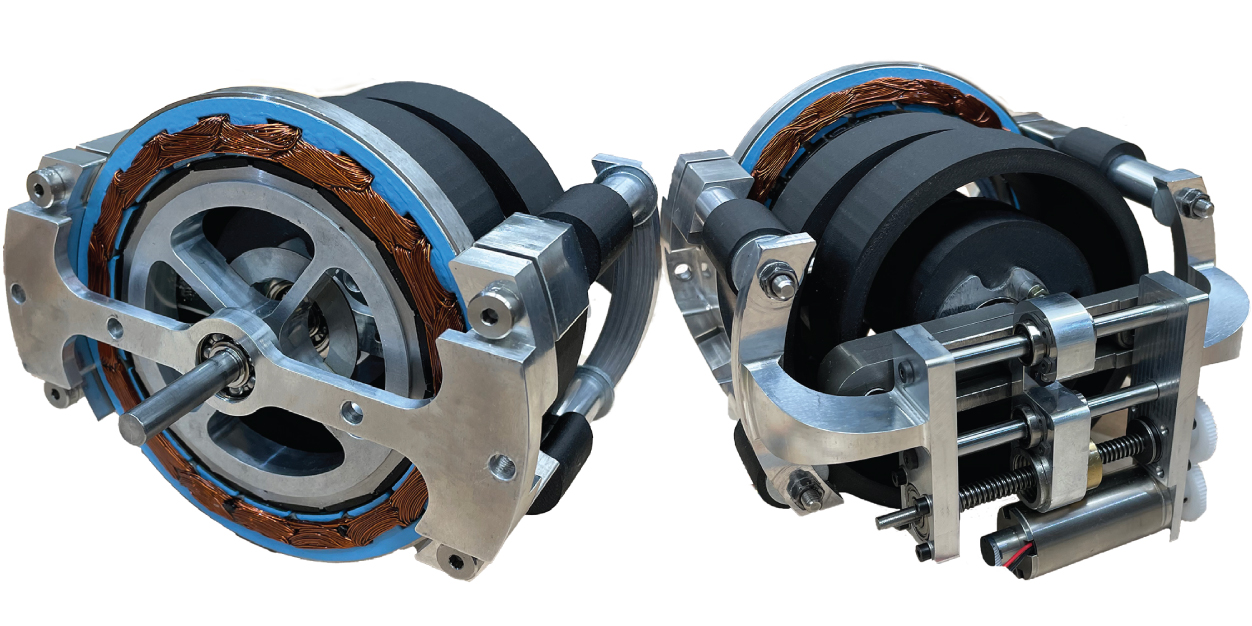
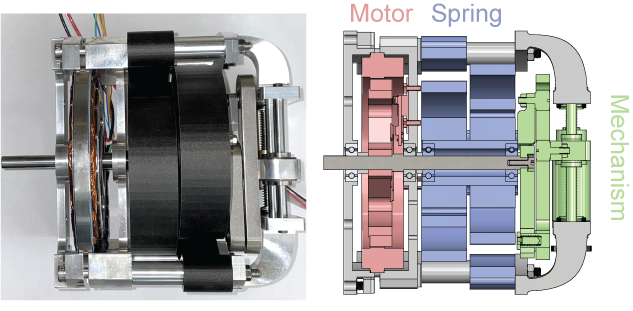
Design of Parallel Variable Stiffness Actuators
C. Mathews and D.J. Braun, Design of Parallel Variable Stiffness Actuators, IEEE Transactions on Robotics, vol. 39, no. 1, pp. 768-782, 2023. This paper introduces a parallel variable stiffness actuator (PVSA) that combines a direct-drive motor with a variable stiffness spring. Unlike conventional parallel elastic actuators, which enable efficient…
Theory of Fast Walking With Human-Driven Load-Carrying Robot Exoskeletons
T. Zhang and D.J. Braun, Theory of Fast Walking With Human-Driven Load-Carrying Robot Exoskeletons, Transactions on Neural Systems and Rehabilitation Engineering, vol. 30, pp. 1971-1981, 2022. This paper develops the theory of a mechanically adaptive, spring-based robot exoskeleton designed to help humans walk faster while…
Parallel Variable Stiffness Actuators
C.W. Mathews and D.J. Braun, Parallel Variable Stiffness Actuators, IEEE-RSJ International Conference on Intelligent Robots and Systems, pp. 8225-8231, 2021. This paper introduces the Parallel Variable Stiffness Actuator (PVSA), a compliant actuator that combines a variable stiffness spring with a direct-drive motor. The compact design achieves both high-fidelity…

Human Driven Compliant Transmission Mechanism
T. Zhang and D.J. Braun, Human Driven Compliant Transmission Mechanism, IEEE International Conference on Robotics and Automation, pp. 7094-7099, 2021. This paper presents a compliant transmission mechanism designed for energetically-passive exoskeletons. The mechanism allows humans to supply energy when the leg is in the air, store it, and…
Iterative Online Optimal Feedback Control
Y. Chen and D.J. Braun, Iterative Online Optimal Feedback Control, vol. 66, no. 2, pp. 566-580, IEEE Transactions on Automatic Control, 2021. This paper introduces a data-driven feedback control method for solving finite-horizon nonlinear optimal control problems with input constraints. The approach combines an approximate system model with real…
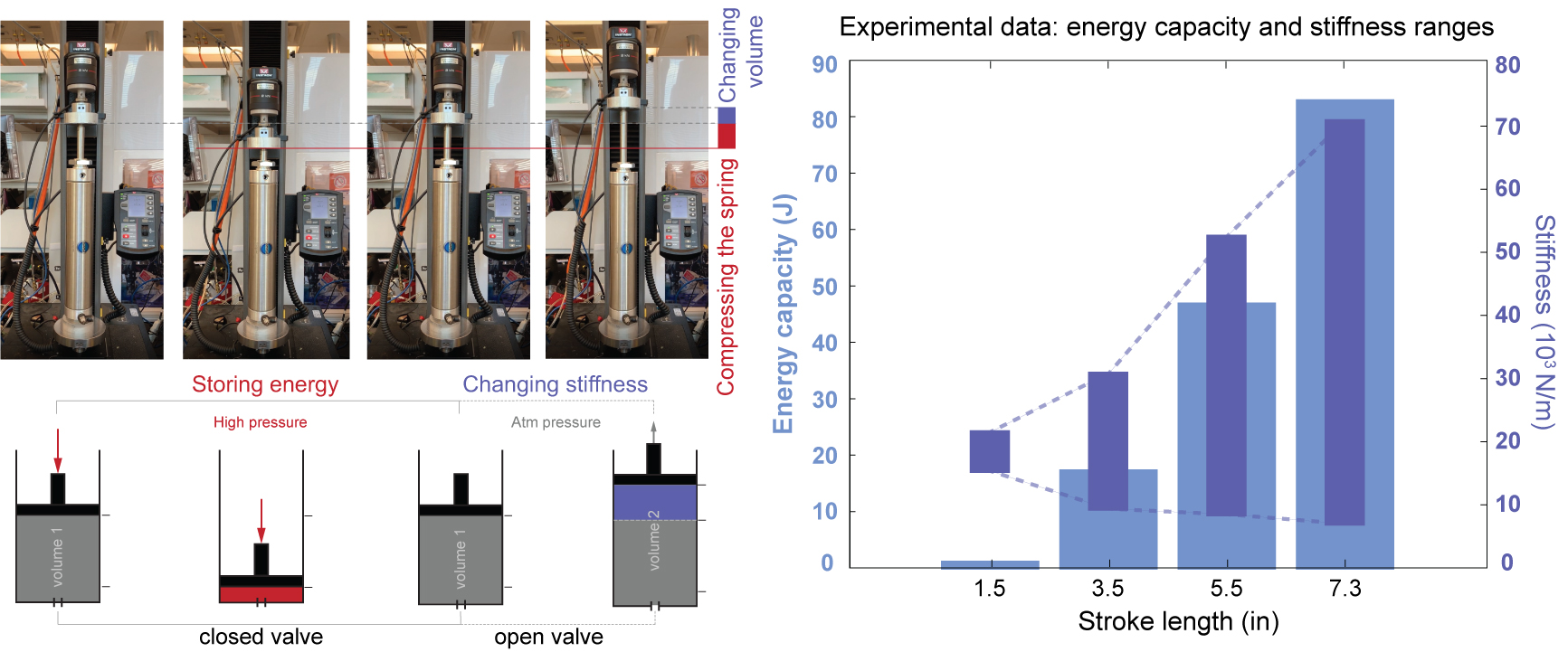
Variable Stiffness Springs for Energy Storage Applications
S. Kim, T. Zhang, and D.J. Braun, Variable Stiffness Springs for Energy Storage Applications, IEEE International Conference on Robotics and Automation, Paris, FR, 2020. This paper challenges the widely accepted trade-off between stiffness and energy storage in spring design. While conventional springs and state-of-the-art variable stiffness actuators…
The Hidden Potential of Energetically-Passive Exoskeletons
A. Sutrisno and D.J. Braun, The Hidden Potential of Energetically Passive Exoskeletons, Wearable Robotics: Challenges and Trends, Proceedings of the 5th International Symposium on Wearable Robotics, WeRob2020, and of WearRAcon Europe 2020, pp. 3-5, October 13–16, 2020. This work explores the fundamental physics of human…
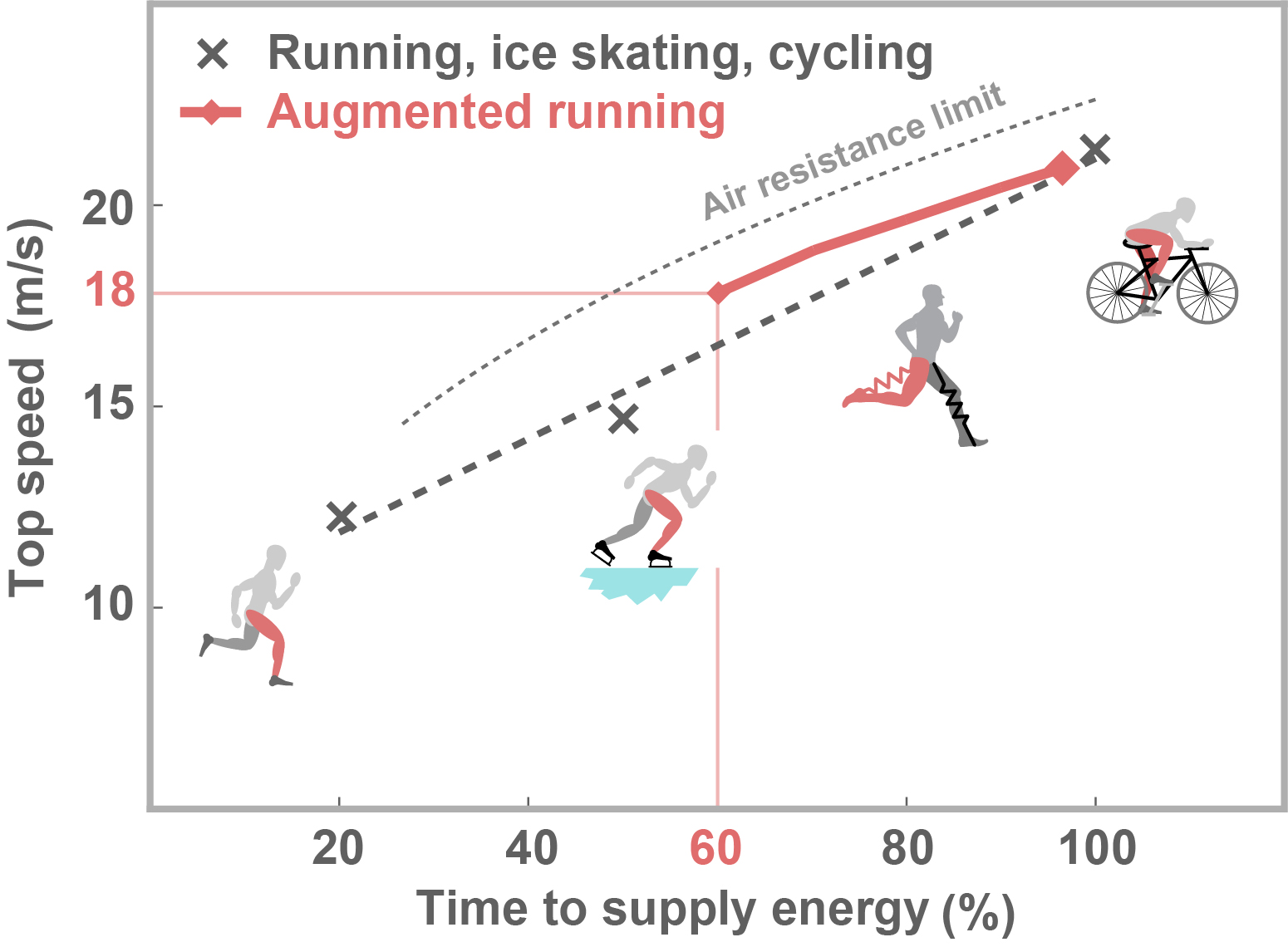
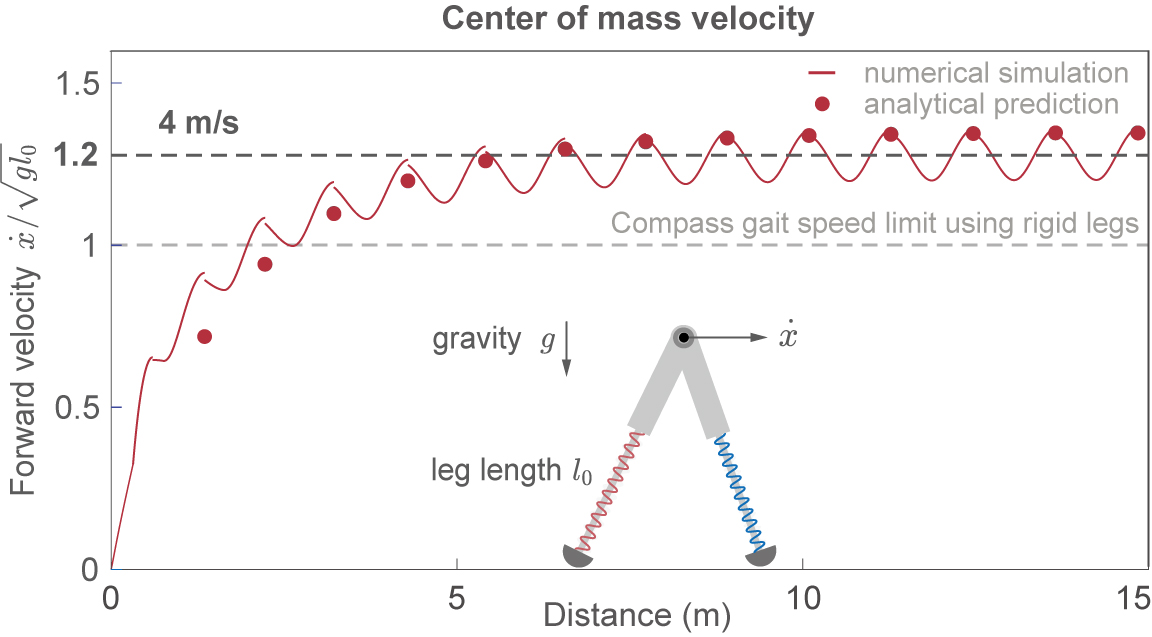
How to Run 50% Faster without External Energy
A. Sutrisno and D.J. Braun, How to Run 50% Faster without External Energy, vol. 6, no. 13, eaay1950, Science Advances, 2020. This paper shows that human running speed can be increased by more than 50% using a catapult-like exoskeleton that does not provide external energy. The study reveals how…
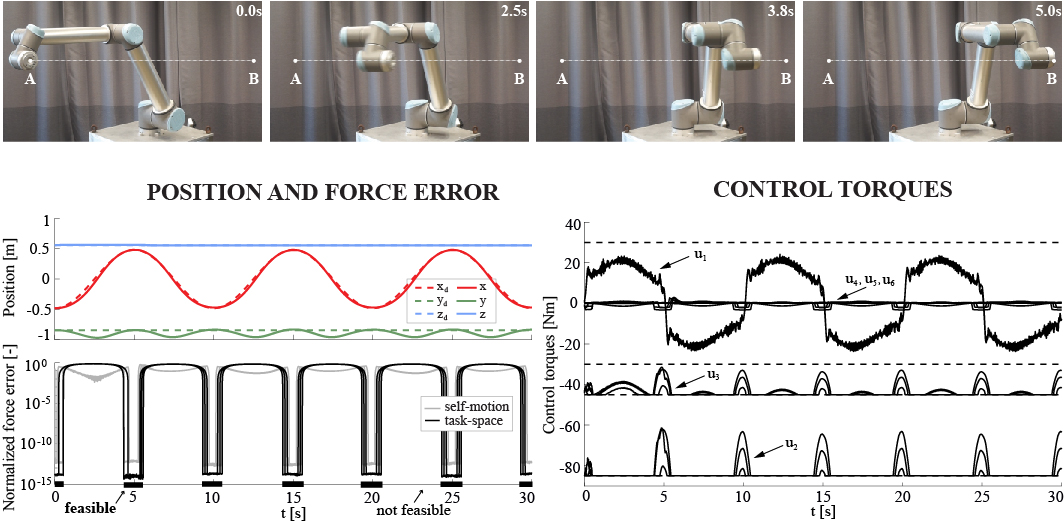
Operational Space Control under Actuation Constraints using Strictly Convex Optimization
D.J. Braun, Y. Chen, L. Li, Operational Space Control under Actuation Constraints using Strictly Convex Optimization, vol. 36, no. 1, pp. 302-309, IEEE Transactions on Robotics, 2019. This paper introduces an operational space controller that accounts for actuator limitations and works with fully actuated, underactuated, and overactuated systems. The…
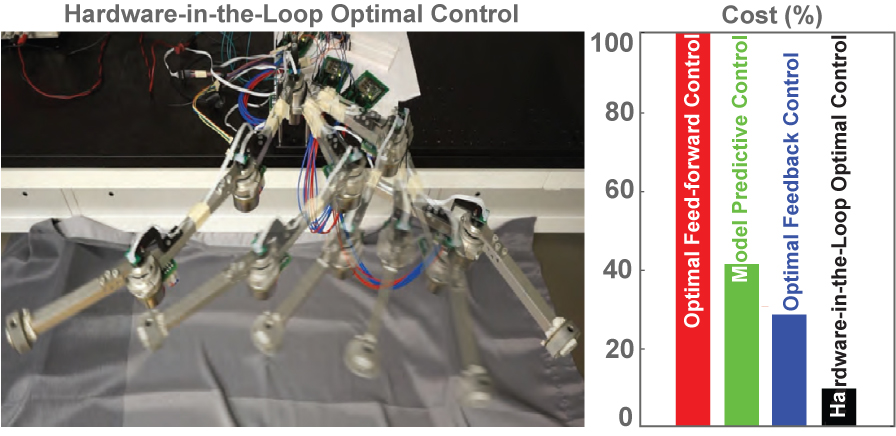
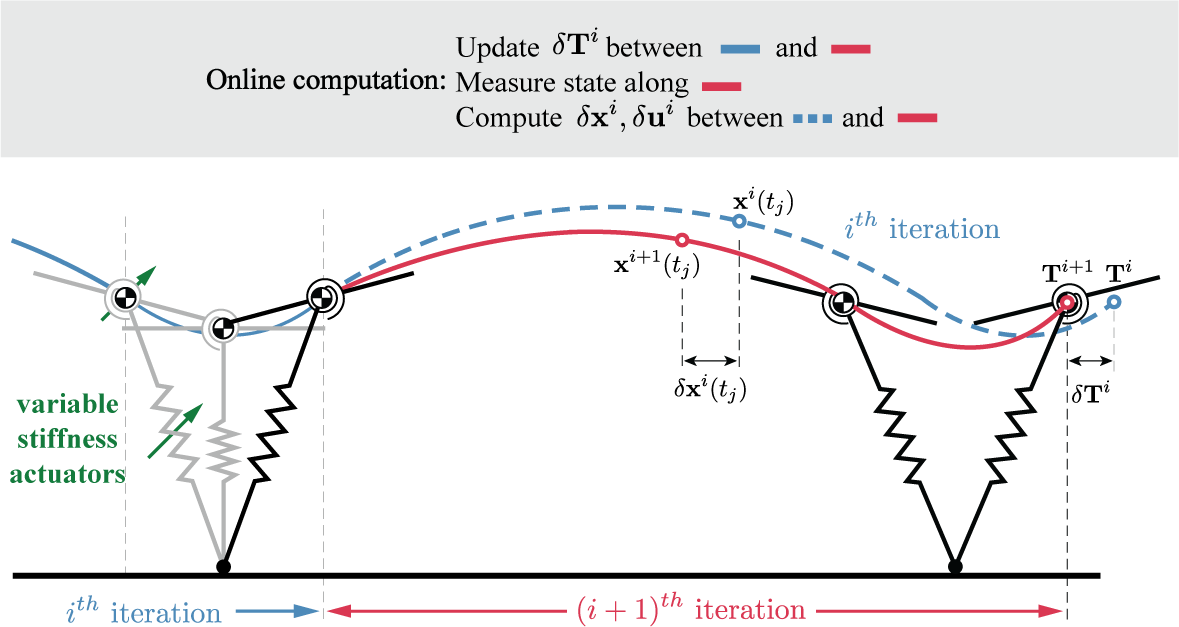
Hardware-in-the-Loop Iterative Optimal Feedback Control without Model-based Future Prediction
Y. Chen and D. J. Braun, Hardware-in-the-Loop Iterative Optimal Feedback Control without Model-based Future Prediction, vol. 35, no. 6, pp. 1419-1434, IEEE Transactions on Robotics, 2019. This paper presents a hardware-in-the-loop optimal control method that overcomes the challenges of model inaccuracy and high computational cost in online optimization.…
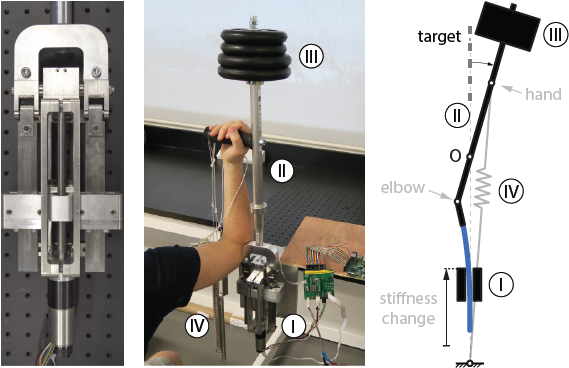
Variable Stiffness Spring Actuators for Low Energy Cost Stiffness Modulation
D.J. Braun, V. Chalvet, Chong T.-H., S.S. Apte and N. Hogan, Variable Stiffness Spring Actuators for Low Energy Cost Stiffness Modulation, vol. 35, no. 6, pp. 1435-1449, IEEE Transactions on Robotics, 2019. This paper introduces a variable-length leaf-spring actuator designed to modulate stiffness with very low energy cost. Unlike…