Y. Chen and D. J. Braun, Hardware-in-the-Loop Iterative Optimal Feedback Control without Model-based Future Prediction, vol. 35, no. 6, pp. 1419-1434, IEEE Transactions on Robotics, 2019.
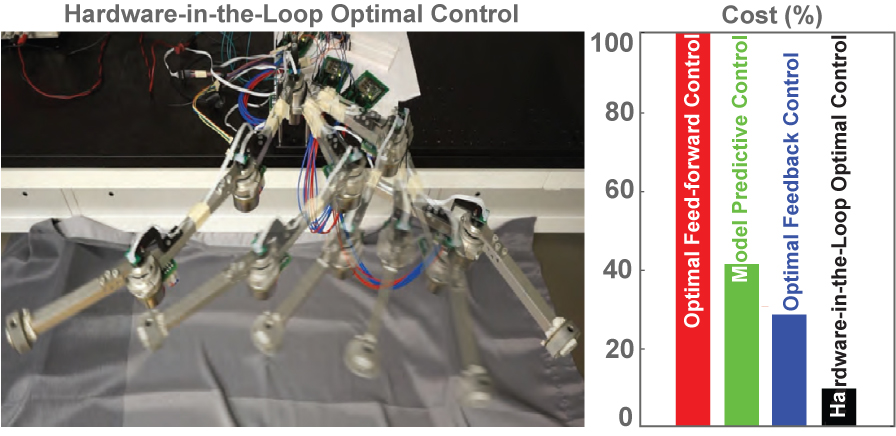
This paper presents a hardware-in-the-loop optimal control method that overcomes the challenges of model inaccuracy and high computational cost in online optimization. Instead of relying on future model predictions, the method combines approximate models with real measured states to compute near-optimal controllers along the actual system trajectory. The approach reduces computation to a small-scale static optimization at each step, making real-time implementation feasible. Its effectiveness is validated through simulations and hardware-in-the-loop experiments.
Why it matters: Classical optimal control is powerful but often too computationally demanding for real-time use in robotics. By minimizing online computation and reducing reliance on precise models, this method makes the advantages of optimal control more practical for real-world robotic systems.