C. Mathews and D.J. Braun, Design of Parallel Variable Stiffness Actuators, IEEE Transactions on Robotics, vol. 39, no. 1, pp. 768-782, 2023.
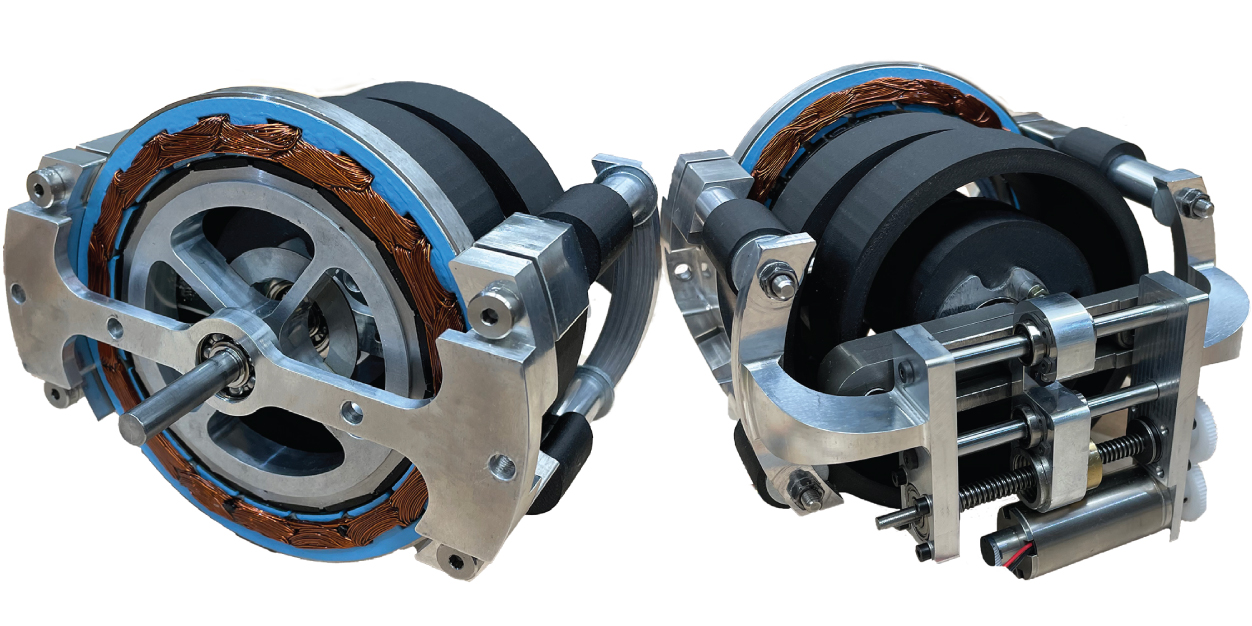
This paper introduces a parallel variable stiffness actuator (PVSA) that combines a direct-drive motor with a variable stiffness spring. Unlike conventional parallel elastic actuators, which enable efficient oscillations only at a single fixed frequency, the PVSA can amplify torque and power across a range of oscillation frequencies while preserving high-fidelity torque control. The design integrates a motor, a composite spring, and a variable stiffness mechanism in a compact cylindrical form, similar to a motor-gearbox unit.
Why it matters: Robots and wearable devices often require both high torque and energy-efficient motion at varying frequencies. PVSAs provide a way to achieve this without sacrificing control precision, making them well suited for mobile robots, exoskeletons, and other applications where efficiency, power, and adaptability are critical.