Conference Papers
Energy Minimization using Custom-Designed Magnetic-Spring Actuators
Y. Y. Fu, A.U. Kilic and D.J. Braun, Energy Minimization using Custom-Designed Magnetic-Spring Actuators, IEEE International Conference on Intelligent Robots and Systems, pp. 3534-3539, October 14 – 18, Abu Dhabi,…
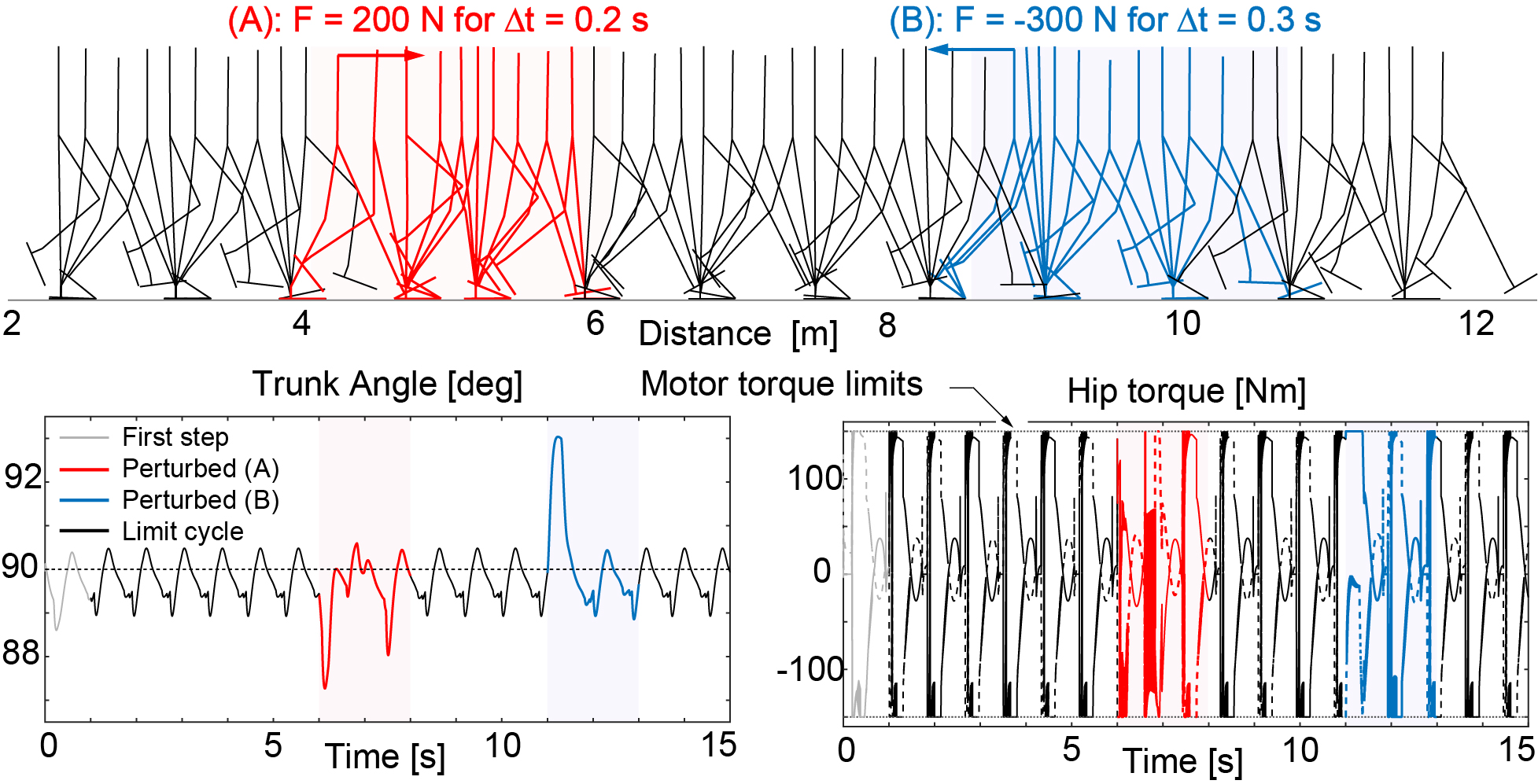
A Novel Approximation for the Spring Loaded Inverted Pendulum Model of Locomotion
A.U. Kilic and D.J. Braun, A Novel Approximation for the Spring-Loaded Inverted Pendulum Model of Locomotion, IEEE International Conference on Intelligent Robots and Systems, pp. 4315-4321, October 1 – 5,…
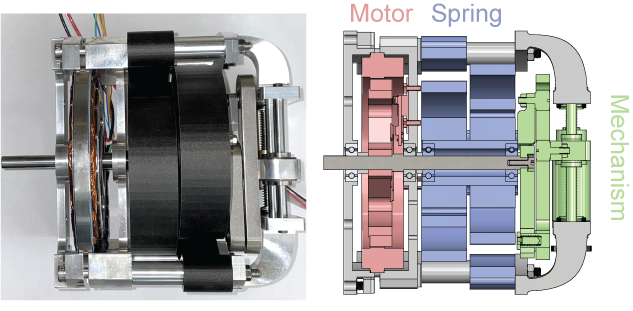
Controllable Mechanical-domain Energy Accumulators
S.Y. Kim and D.J. Braun, Controllable Mechanical-domain Energy Accumulators, IEEE International Conference on Robotics and Automation, London, United Kingdom, pp. 7359-7364, 2023. Springs are efficient in storing and returning elastic potential…
Design of a Variable Stiffness Spring with Human-Selectable Stiffness
C. Mathews and D.J. Braun, Design of a Variable Stiffness Spring with Human-Selectable Stiffness, IEEE International Conference on Robotics and Automation, London, United Kingdom, pp. 7385-7390, 2023. Springs are commonly used…
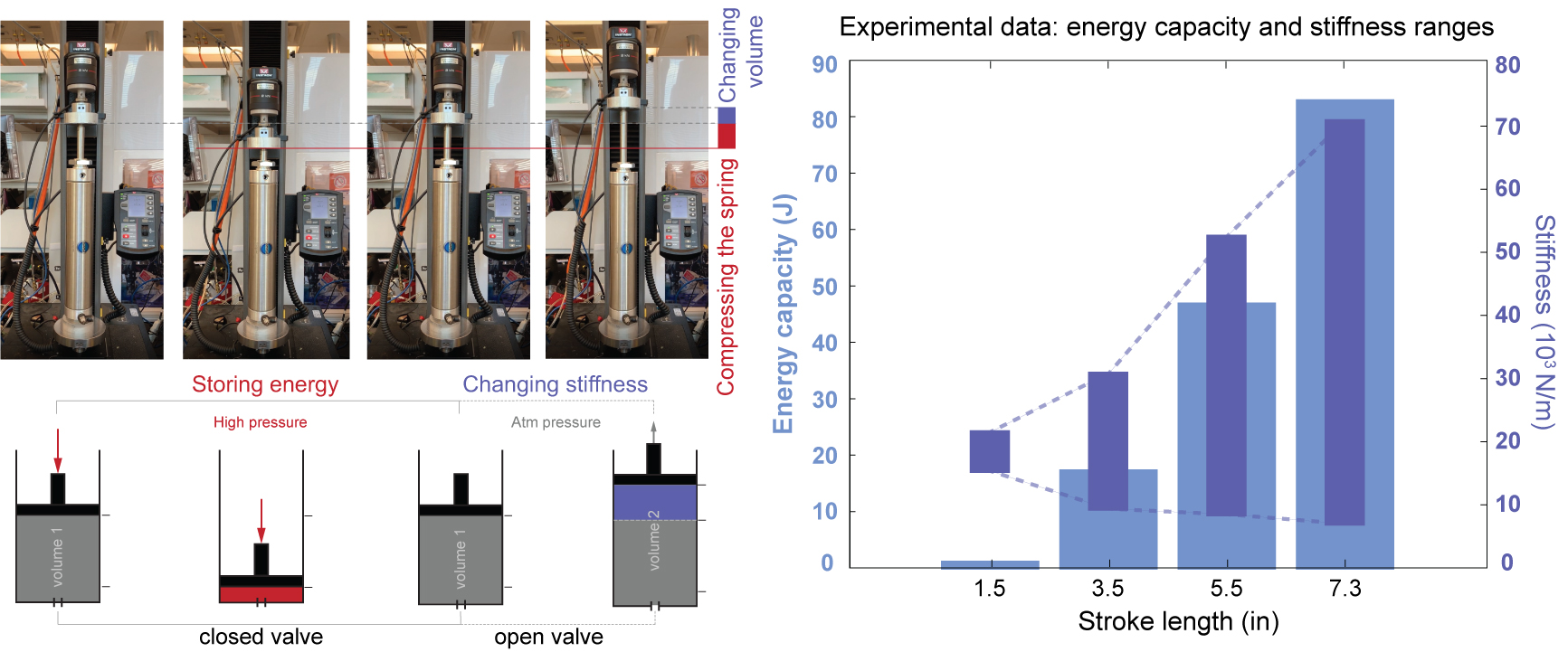
Novel Spring Mechanism Enables Iterative Energy Accumulation under Force and Deformation Constraints
C. Dempsey and D.J. Braun, Novel Spring Mechanism Enables Iterative Energy Accumulation under Force and Deformation Constraints, IEEE International Conference on Robotics and Automation, London, United Kingdom, pp. 7391-7397, 2023. Springs…
Parallel Variable Stiffness Actuators
C.W. Mathews and D.J. Braun, Parallel Variable Stiffness Actuators, IEEE-RSJ International Conference on Intelligent Robots and Systems, pp. 8225-8231, 2021. In this paper, we introduce a new type of compliant actuator named the…

Human Driven Compliant Transmission Mechanism
T. Zhang and D.J. Braun, Human Driven Compliant Transmission Mechanism, IEEE International Conference on Robotics and Automation, pp. 7094-7099, 2021. Energetically-passive robot exoskeletons, mimicking the function of the bicycle, could enable humans to…
Variable Stiffness Springs for Energy Storage Applications
S. Kim, T. Zhang, and D.J. Braun, Variable Stiffness Springs for Energy Storage Applications, IEEE International Conference on Robotics and Automation, Paris, FR, 2020. Theory suggests an inverse relation between the stiffness…
The Hidden Potential of Energetically-Passive Exoskeletons
A. Sutrisno and D.J. Braun, The Hidden Potential of Energetically Passive Exoskeletons, Wearable Robotics: Challenges and Trends, Proceedings of the 5th International Symposium on Wearable Robotics, WeRob2020, and of WearRAcon…
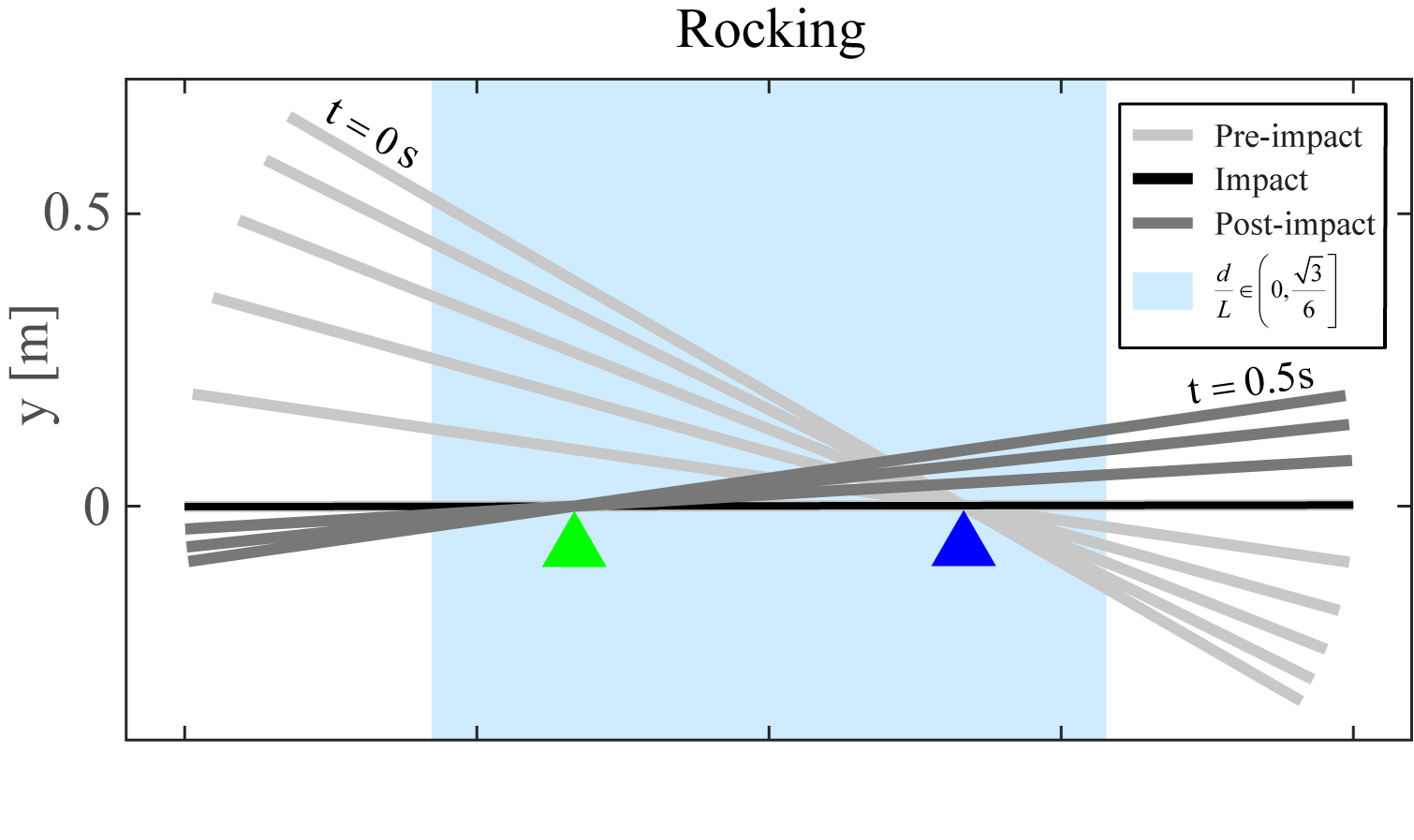
Algorithmic Resolution of Multiple Impacts in Non-smooth Mechanical Systems with Switching Constraints
Y. Li, H. Yu, and D.J. Braun, Algorithmic Resolution of Multiple Impacts in Non-smooth Mechanical Systems with Switching Constraints, IEEE International Conference on Robotics and Automation, Montreal, CA, pp. 7639-7645, May 2019.…
Constrained Feedback Control by Prioritized Multi-objective Optimization
L. Li and D.J. Braun, Constrained Feedback Control by Prioritized Multi-objective Optimization, IEEE International Conference on Robotics and Automation, Montreal, CA, pp. 9496-9501, May 2019. Prioritized multi-objective optimization has been widely used within…
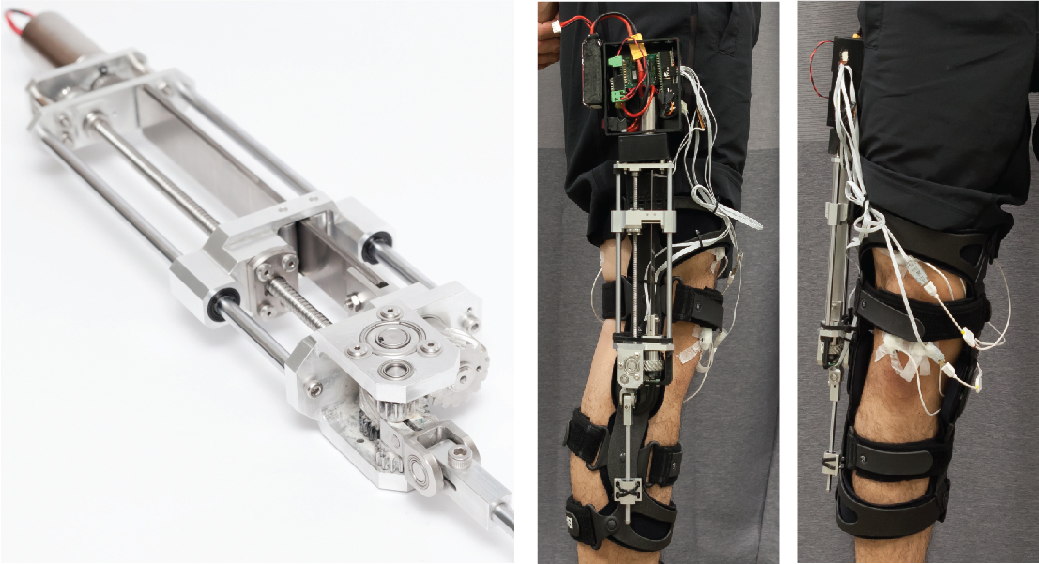
Stiffness Modulator: A Novel Actuator for Human Augmentation
H.-F. Lau, A. Sutrisno, T.-H. Chong, D.J. Braun, Stiffness Modulator: A Novel Actuator for Human Augmentation, IEEE International Conference on Robotics and Automation, pp. 7742-7748, 2018. Stiffness modulators are devices that promote…