Research
My research focuses on the optimal control and design of Mechanically Adaptive Robots—machines that learn and improve through experience, much like humans. This work integrates real-time optimization algorithms and advances in actuator design to enable mechanical adaptation and enhance robot autonomy. By bridging theory and application, my research advances the theory of human performance augmentation and robot actuation using devices that provide mechanical advantage. This includes innovations in adaptive actuators, robotic limbs, and exoskeletons—technologies designed to improve both human and robot mobility. This multidisciplinary work has been supported by the Singaporean Ministry of Education and the National Science Foundation, earning recognition through the IEEE Transactions on Robotics Best Paper Award and the NSF CAREER Award. Explore my latest insights in the project blog posts below.
Projects
Mechanically Adaptive Robot Exoskeletons to Improve Human Mobility
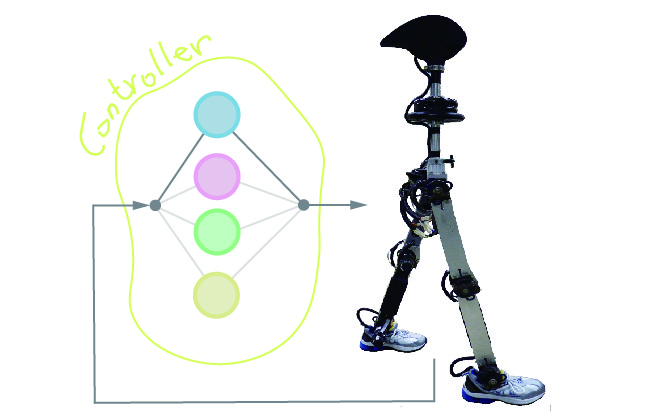
We work on the theory of mechanically adaptive robot exoskeletons, to create unpowered but mechanically-adaptive devices and devices driven by small actuators (for example, a small electric motor), that provide…
Mechanically Adaptive Actuators to Advance Robot Autonomy
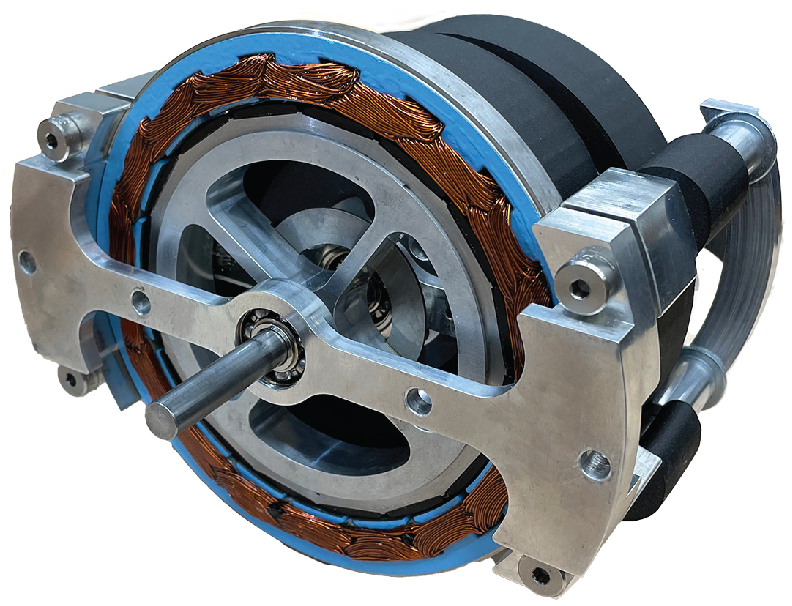
Actuators are one of the key components of robots; they are used in industrial robots, humanoids, but also automobiles. We focus on developing compliant actuators which consist of springs attached…
”Robots Teaching Robots” as a Real-time Optimal Control Paradigm
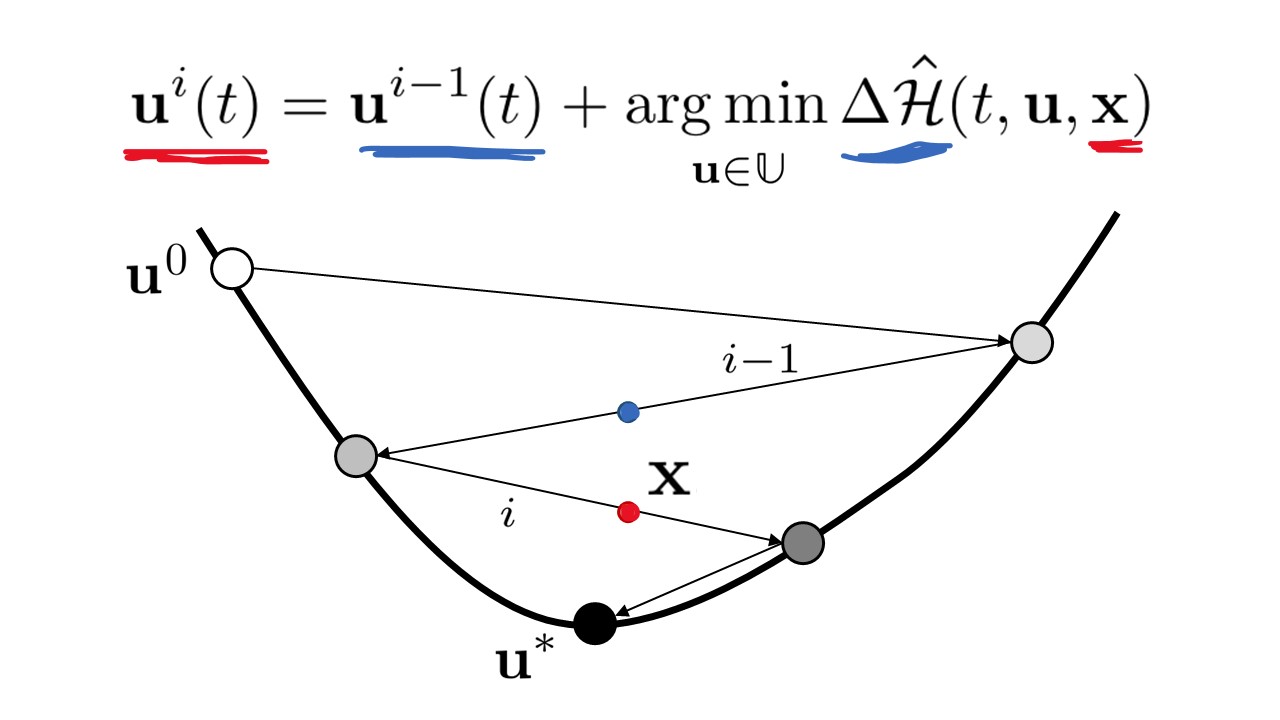
We promote the optimization of robot performance via real-time experiments guided by dedicated teacher robots, instead of optimizing system performance guided by uncertain model-based predictions and measured data. The method…
Reverse-Engineering Nature for Locomotion Control in Robots
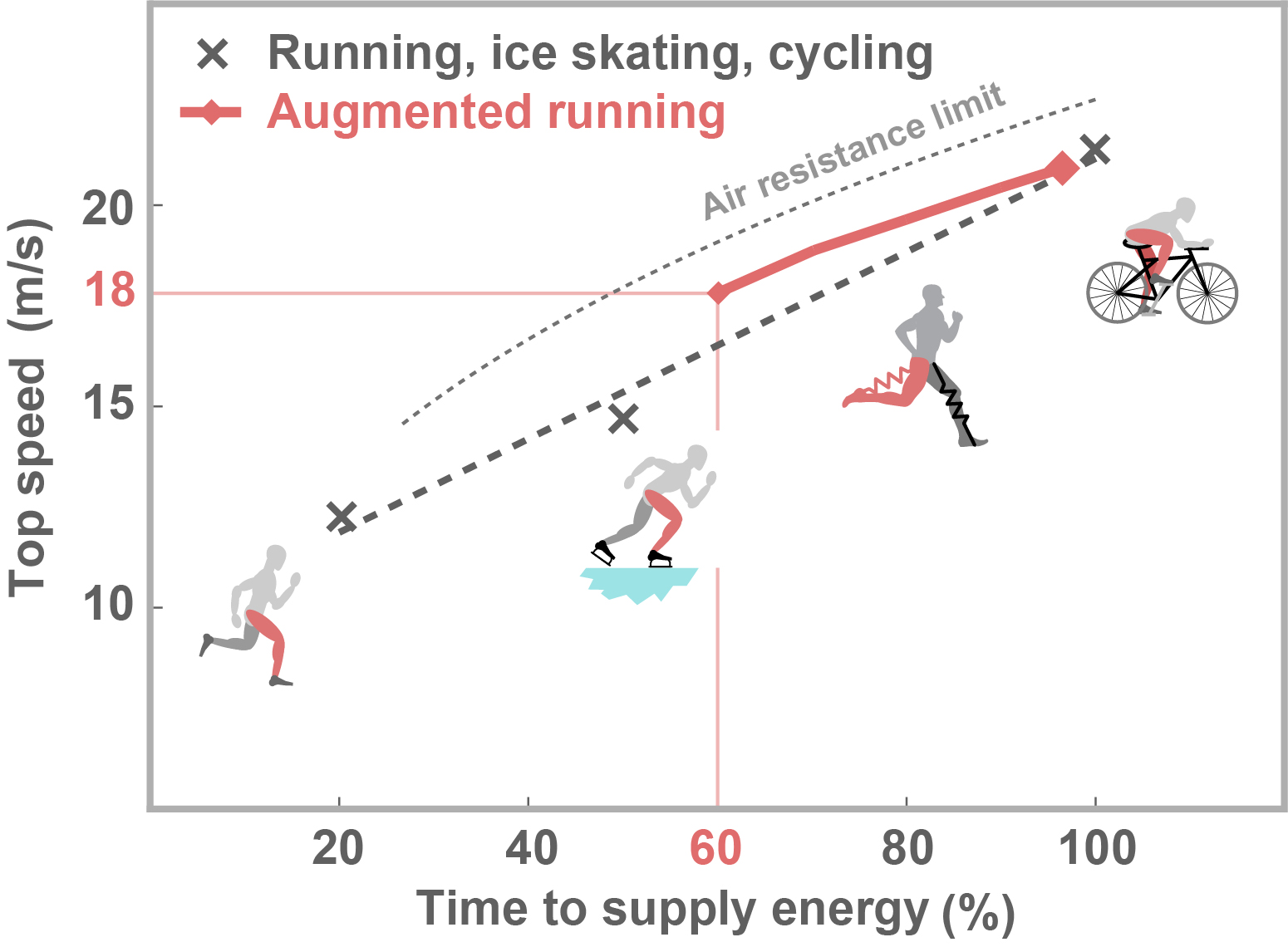
Understanding the principles underlying human motion is the first step in developing robots for human assistance and augmentation; exoskeletons for rescue operations, or to assist in case of locomotor impairment…
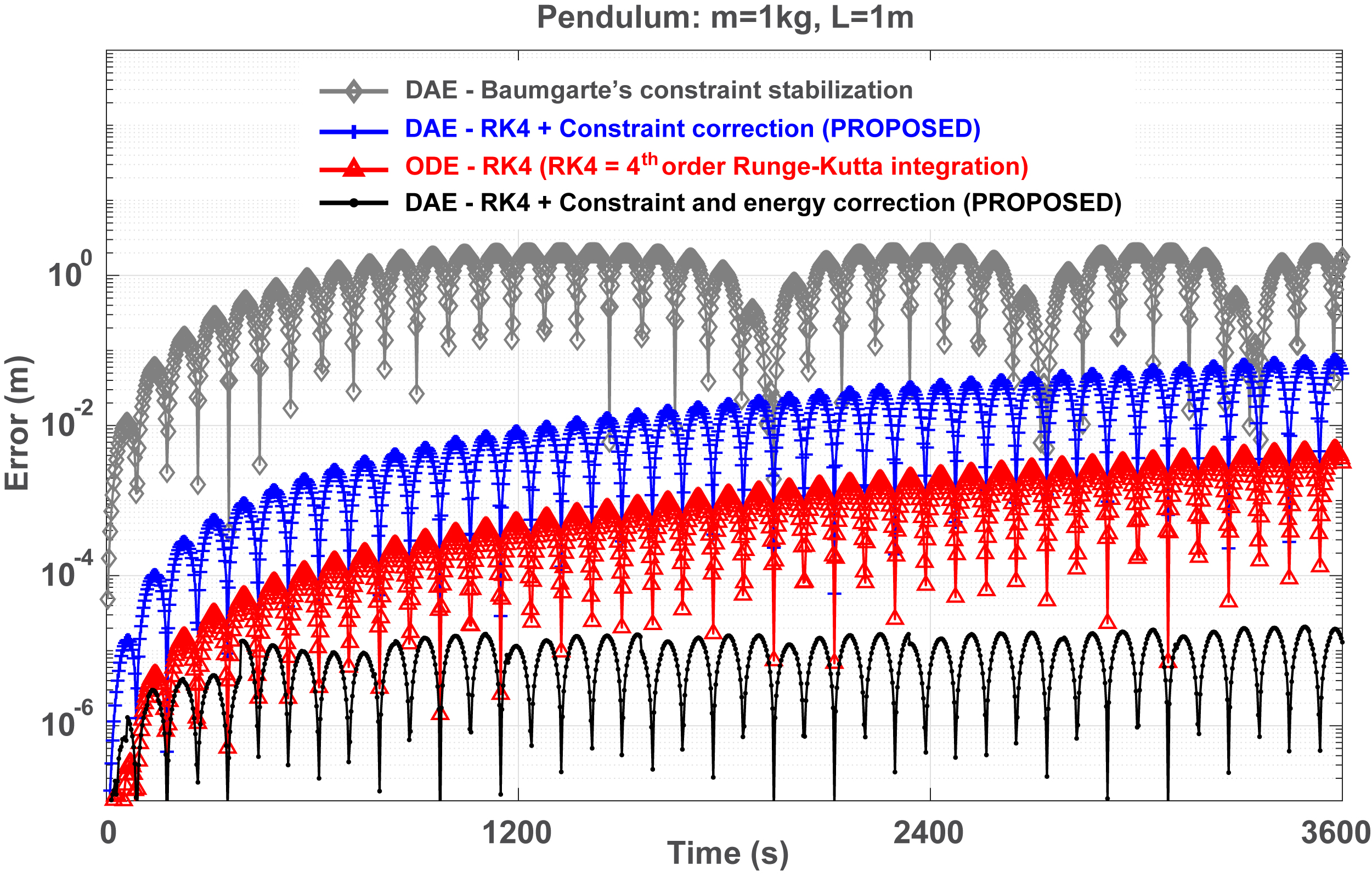
Physics-based Numerical Simulation Methods for Predicting Robot Behavior
Robots that interact with the environment are constrained dynamical systems. Constrained dynamical systems can be modeled using a set of differential equations subject to holonomic and non-holonomic constraints; algebraic constraints.…