Publications
Constrained Feedback Control by Prioritized Multi-objective Optimization
L. Li and D.J. Braun, Constrained Feedback Control by Prioritized Multi-objective Optimization, IEEE International Conference on Robotics and Automation, Montreal, CA, pp. 9496-9501, May 2019. Prioritized multi-objective optimization has been widely used within the operational space inverse dynamics control framework. In this paper, we present a constrained prioritized…
A Phase-Invariant Linear Torque-Angle-Velocity Relation Hidden in the Human Walking Data
E.S. Altinkaynak and D.J. Braun, A Phase-Invariant Linear Torque-Angle-Velocity Relation Hidden in the Human Walking Data, vol. 27, no. 4, pp. 702-711, IEEE Transactions on Neural Systems & Rehabilitation Engineering, 2019. Human walking is a sequential composition of gait cycles. Each gait cycle can be divided into…
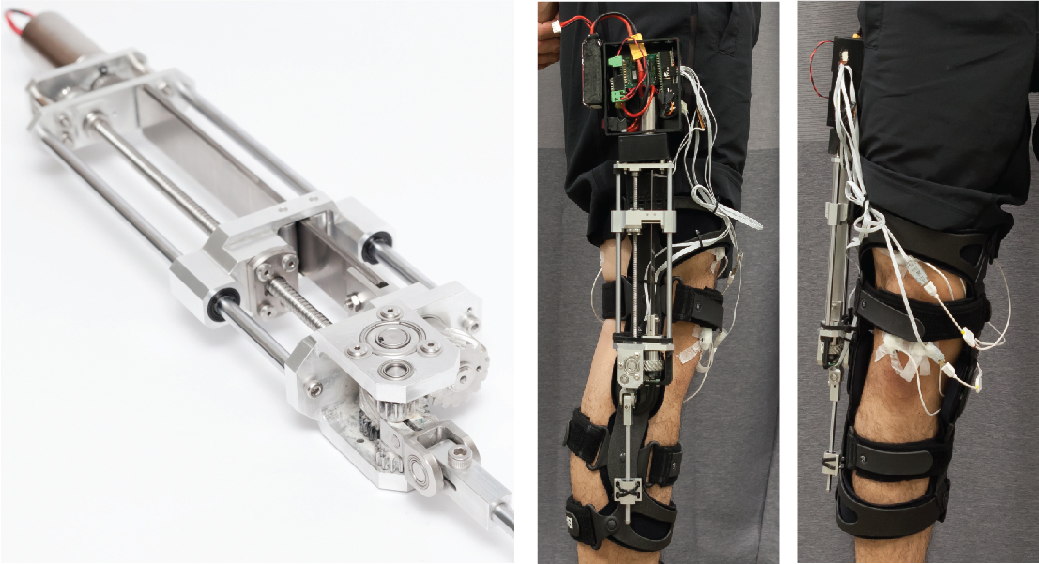
Enhancing Mobility with Quasi-passive Variable Stiffness Exoskeletons
A. Sutrisno and D.J. Braun, Enhancing Mobility with Quasi-passive Variable Stiffness Exoskeletons, IEEE Transactions on Neural Systems & Rehabilitation Engineering, vol. 27, no. 3, pp. 487-496, 2019. Highlighted research by IEEE Transactions on Neural Systems & Rehabilitation Engineering. Shoes were invented to provide user comfort using rubber…
Reinforcement Learning for a Class of Continuous-time Input Constrained Optimal Control Problems
F. A. Yaghmaie and D.J. Braun, Reinforcement Learning for a Class of Continuous-time Input Constrained Optimal Control Problems, Automatica, vol. 99, pp. 221-227, 2019. In this paper, we identify a class of input constrained optimal control problems which can be approximately solved using Reinforcement Learning (RL) approaches. We start…
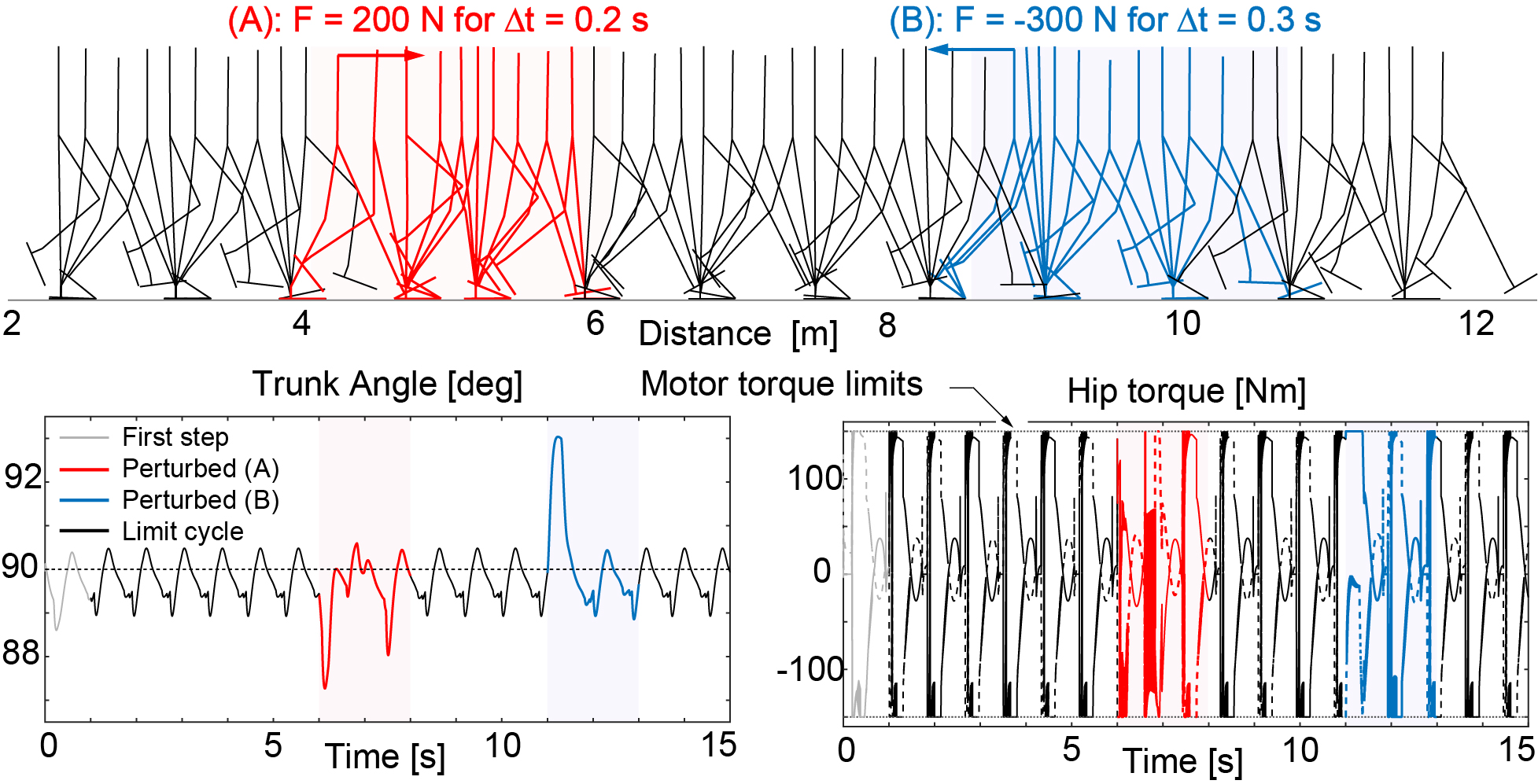
Efficiently Computable Constrained Optimal Feedback Controllers
Y. Chen, L. Roveda and D.J. Braun, Efficiently Computable Constrained Optimal Feedback Controllers, IEEE Robotics and Automation Letters, vol. 4, no. 1, pp. 121-128, 2018. Constrained optimal feedback controllers can be used to mitigate external perturbations and modeling errors in robot control. However, these controllers require extensive…
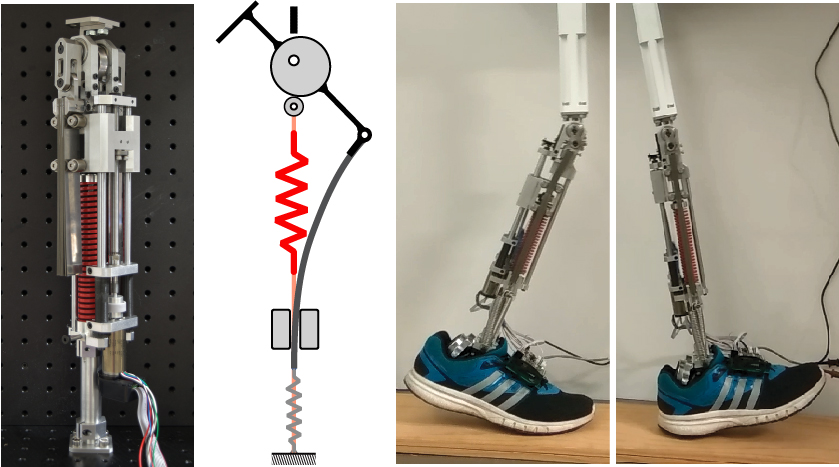
Positive-Negative Stiffness Actuators
D.J. Braun, V. Chalvet and A. Dahiya, Positive-Negative Stiffness Actuators, IEEE Transactions on Robotics, vol. 35, no. 1, pp. 162-173, 2018. Compliant actuators are typically designed to possess a tunable positive stiffness characteristic in order to generate restoring force upon displacement. These actuators either require two independent motor…
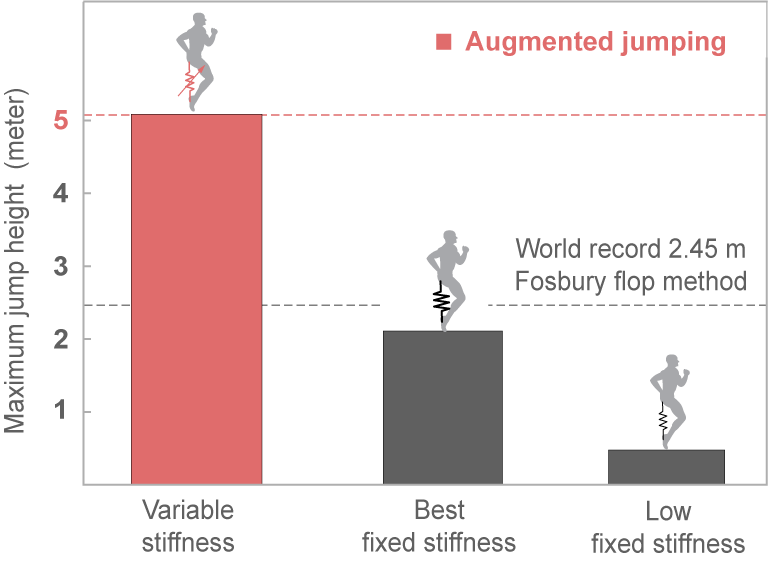
Stiffness Modulator: A Novel Actuator for Human Augmentation
H.-F. Lau, A. Sutrisno, T.-H. Chong, D.J. Braun, Stiffness Modulator: A Novel Actuator for Human Augmentation, IEEE International Conference on Robotics and Automation, pp. 7742-7748, 2018. Stiffness modulators are devices that promote a novel means of actuation; they provide stiffness modulation without deliberately doing mechanical work. These…
Algorithmic Design of Low Power Variable Stiffness Mechanisms
V. Chalvet and D.J. Braun, Algorithmic Design of Low Power Variable Stiffness Mechanisms, IEEE Transactions on Robotics, vol. 33, no. 6, pp. 1508-1515, 2017. Compliant actuators enabling low-power stiffness adaptation are missing ingredients and key enablers of next generation robotic systems. One of the key components of these…
Analytical Conditions for the Design of Variable Stiffness Mechanisms
C. Tze-Hao, V. Chalvet and D.J. Braun, Analytical Conditions for the Design of Variable Stiffness Mechanisms, IEEE International Conference on Robotics and Automation, Singapore, SG, pp. 1241-1247, May 2017. This paper introduces an analytical approach for the design of variable stiffness mechanisms. The basis of this approach…
Efficiently Tuneable Positive-Negative Stiffness Actuator
A. Dahiya and D.J. Braun, Efficiently Tunable Positive-Negative Stiffness Actuator, IEEE International Conference on Robotics and Automation, Singapore, SG, pp. 1235-1240, May 2017. Compliant actuators have found their place in areas of prosthetics, rehabilitation and robot locomotion because they enable safe human-robot and stable robot-environment interaction, both non-trivial…
Criterion for the Design of Low Power Variable Stiffness Mechanisms
V. Chalvet and D.J. Braun, Criterion for the Design of Low Power Variable Stiffness Mechanisms, IEEE Transactions on Robotics, vol. 33, no. 4, 1002-1010, 2017. Designing robotic systems capable of low-power operation, inherent to their compliant actuation, has been elusive in practical application. In this paper, we propose…
Spatio-Temporal Stiffness Optimization in Movements with Switching Dynamics
J. Nakanishi, A. Radulescu, D.J. Braun and S. Vijayakumar, Spatio-Temporal Stiffness Optimization in Movements with Switching Dynamics, Autonomous Robots, vol. 41, no. 2, pp. 273-291, 2017. We address the optimal control problem of robotic systems with variable stiffness actuation (VSA) including switching dynamics and discontinuous state transitions.…