Publications
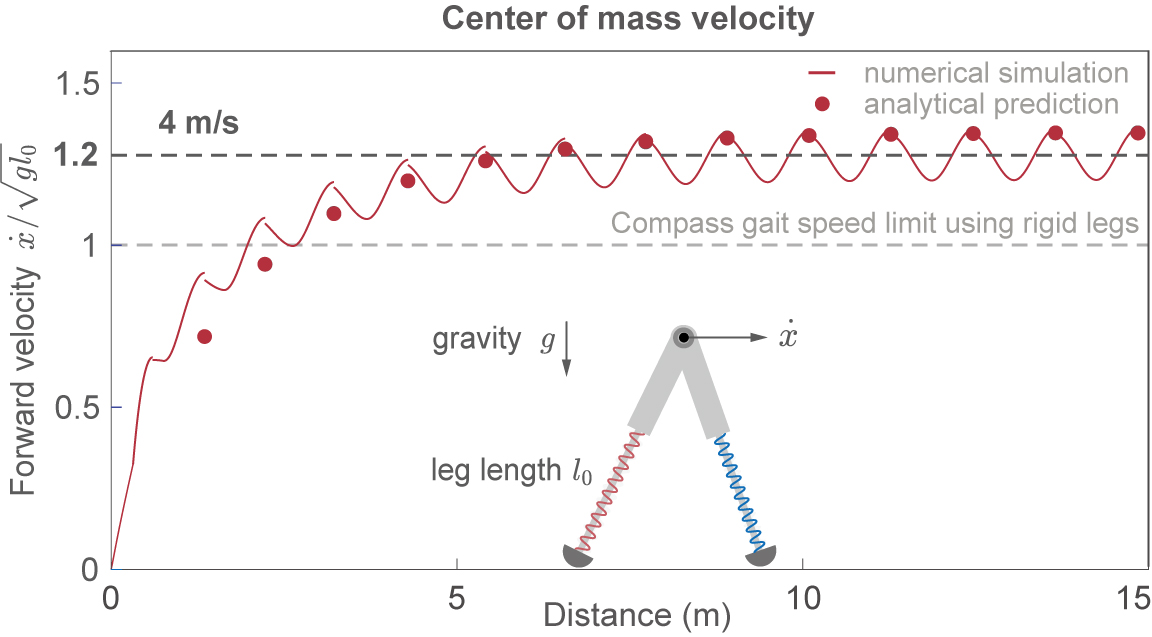
Theory of Fast Walking With Human-Driven Load-Carrying Robot Exoskeletons
T. Zhang and D.J. Braun, Theory of Fast Walking With Human-Driven Load-Carrying Robot Exoskeletons, Transactions on Neural Systems and Rehabilitation Engineering, vol. 30, pp. 1971-1981, 2022. Reaching and maintaining high walking speeds is challenging for a human when carrying extra weight, such as walking with…
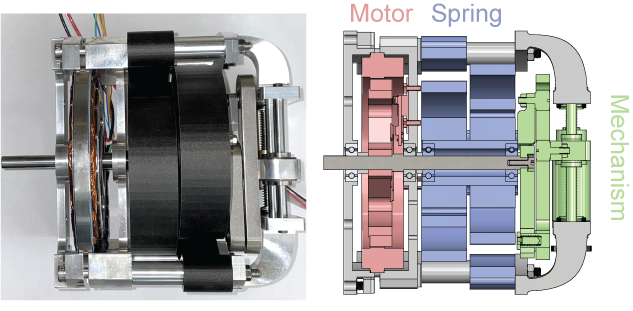
Parallel Variable Stiffness Actuators
C.W. Mathews and D.J. Braun, Parallel Variable Stiffness Actuators, IEEE-RSJ International Conference on Intelligent Robots and Systems, pp. 8225-8231, 2021. In this paper, we introduce a new type of compliant actuator named the Parallel Variable Stiffness Actuator (PVSA) which consists of a variable stiffness spring placed in parallel…

Human Driven Compliant Transmission Mechanism
T. Zhang and D.J. Braun, Human Driven Compliant Transmission Mechanism, IEEE International Conference on Robotics and Automation, pp. 7094-7099, 2021. Energetically-passive robot exoskeletons, mimicking the function of the bicycle, could enable humans to reach previously unprecedented mobility. However, energetically-passive robot exoskeletons require a sophisticated mechanism to enable the…
Iterative Online Optimal Feedback Control
Y. Chen and D.J. Braun, Iterative Online Optimal Feedback Control, vol. 66, no. 2, pp. 566-580, IEEE Transactions on Automatic Control, 2021. This article proposes a data-driven iterative feedback control method to efficiently solve finite time horizon, nonlinear, input constrained optimal control problems. The proposed method introduces a novel…
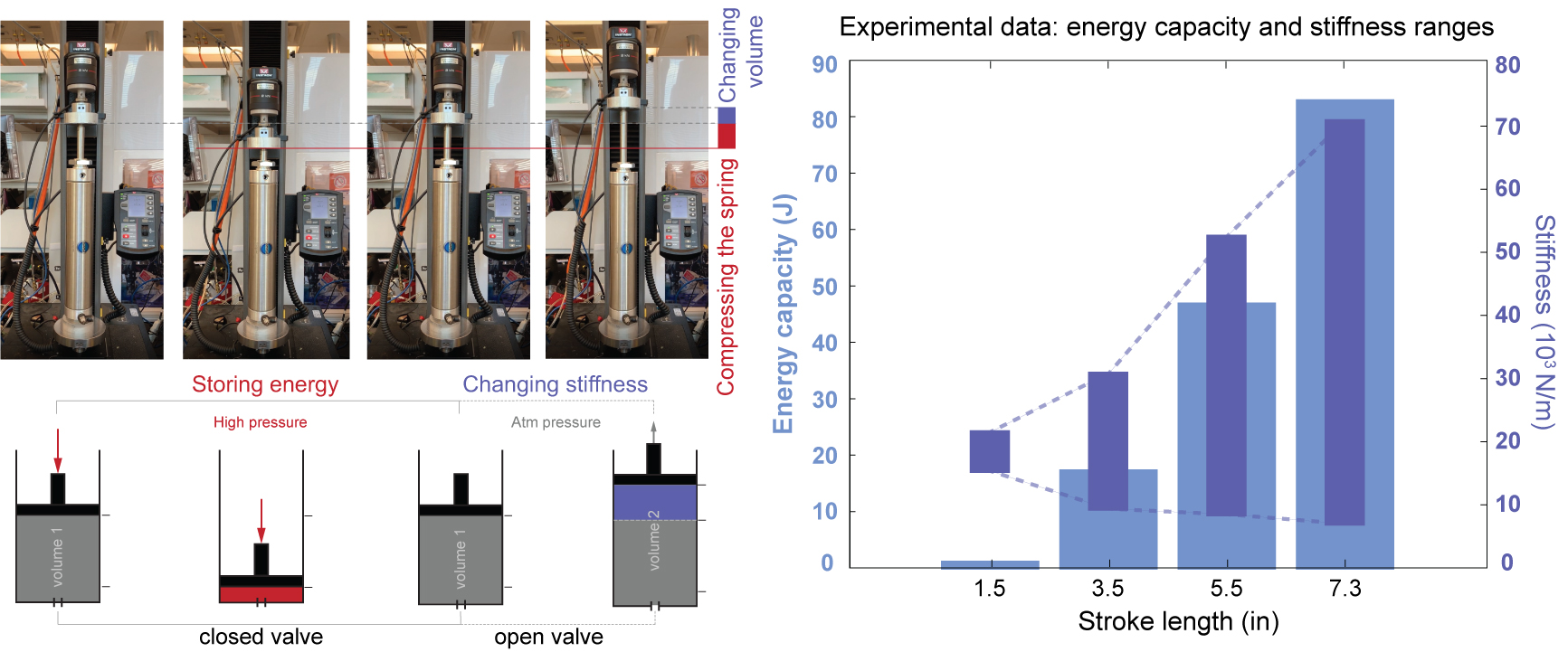
Variable Stiffness Springs for Energy Storage Applications
S. Kim, T. Zhang, and D.J. Braun, Variable Stiffness Springs for Energy Storage Applications, IEEE International Conference on Robotics and Automation, Paris, FR, 2020. Theory suggests an inverse relation between the stiffness and the energy storage capacity for linear helical springs: reducing the active length of the…
The Hidden Potential of Energetically-Passive Exoskeletons
A. Sutrisno and D.J. Braun, The Hidden Potential of Energetically Passive Exoskeletons, Wearable Robotics: Challenges and Trends, Proceedings of the 5th International Symposium on Wearable Robotics, WeRob2020, and of WearRAcon Europe 2020, pp. 3-5, October 13–16, 2020. Bicycles have successfully augmented top human movement speed…
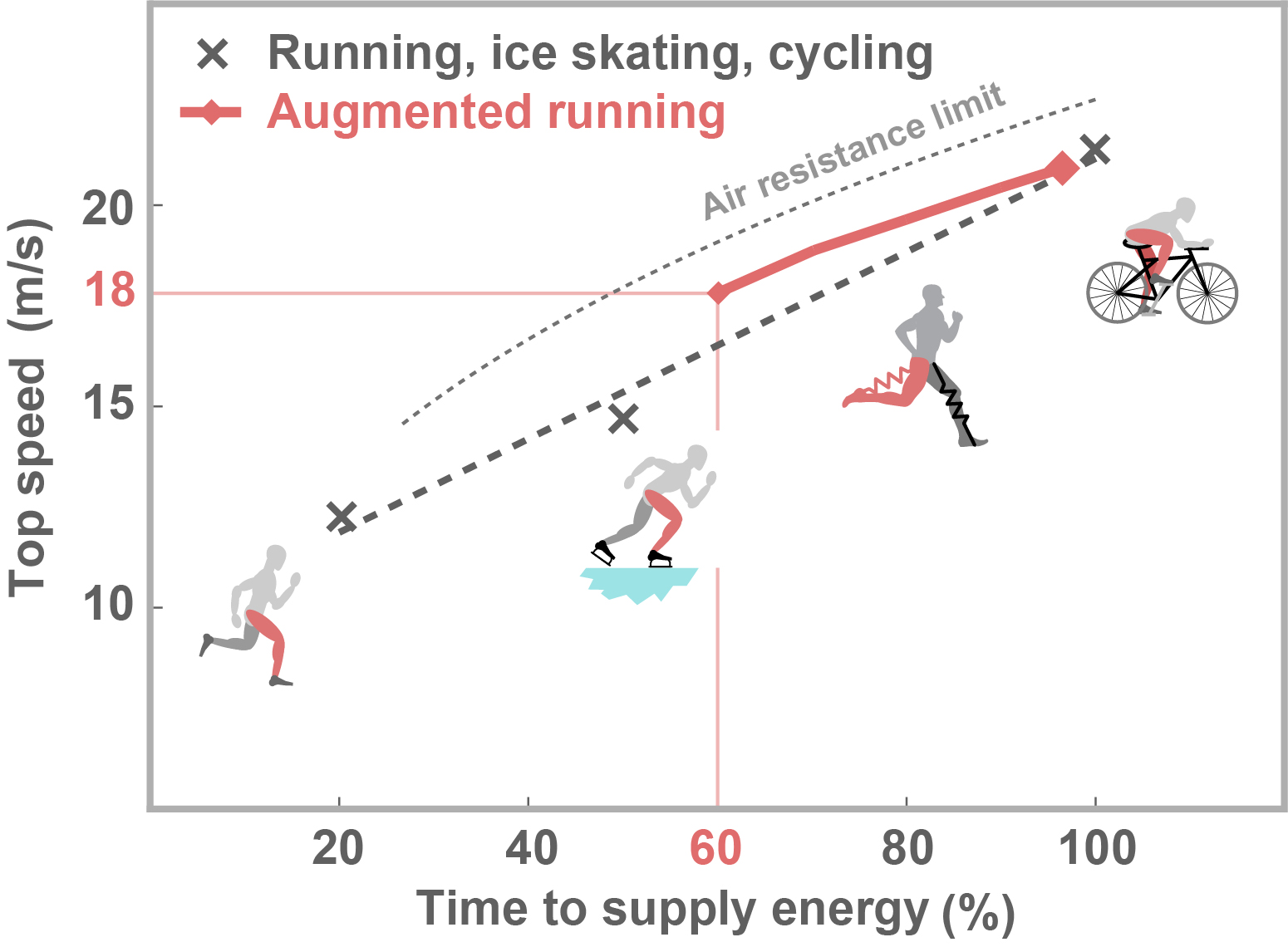
How to Run 50% Faster without External Energy
A. Sutrisno and D.J. Braun, How to Run 50% Faster without External Energy, vol. 6, no. 13, eaay1950, Science Advances, 2020. Technological innovations may enable next-generation running shoes to provide unprecedented mobility. But how could a running shoe increase the speed of motion without providing external energy? We found…
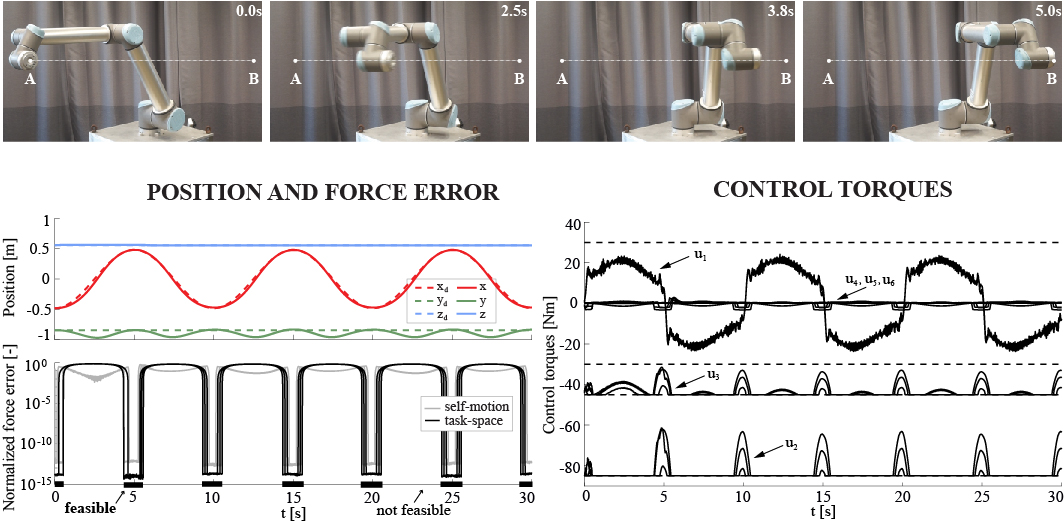
Operational Space Control under Actuation Constraints using Strictly Convex Optimization
D.J. Braun, Y. Chen, L. Li, Operational Space Control under Actuation Constraints using Strictly Convex Optimization, vol. 36, no. 1, pp. 302-309, IEEE Transactions on Robotics, 2019. Operational space feedback controllers can be used for tracking, motion coordination, stabilization, and a variety of other practical tasks. However, classical operational…
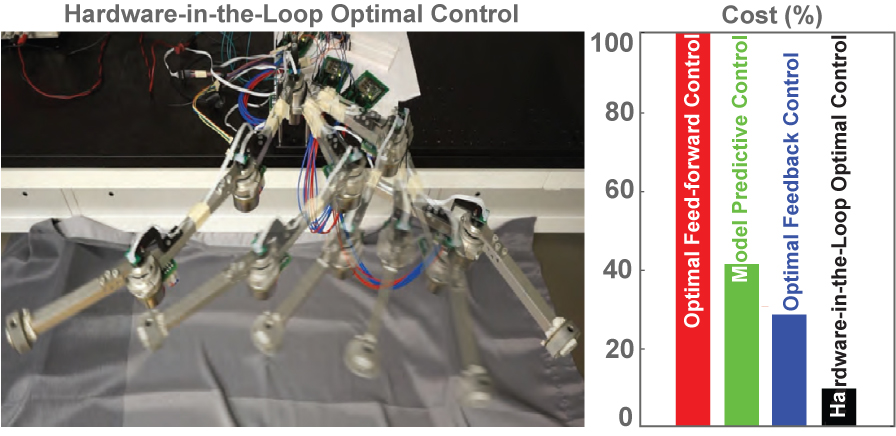
Hardware-in-the-Loop Iterative Optimal Feedback Control without Model-based Future Prediction
Y. Chen and D. J. Braun, Hardware-in-the-Loop Iterative Optimal Feedback Control without Model-based Future Prediction, vol. 35, no. 6, pp. 1419-1434, IEEE Transactions on Robotics, 2019. Optimal control provides a systematic approach to control robots. However, computing optimal controllers for hardware-in-the-loop control is sensitively affected by modeling assumptions,…
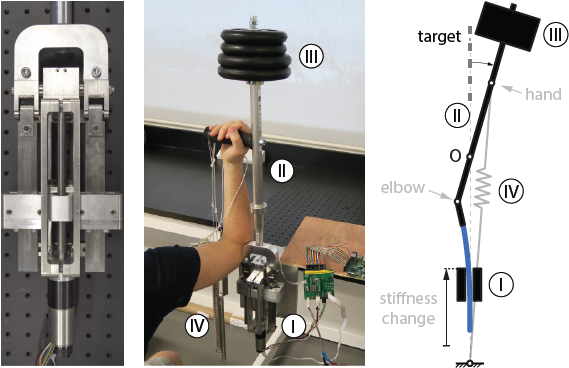
Variable Stiffness Spring Actuators for Low Energy Cost Stiffness Modulation
D.J. Braun, V. Chalvet, Chong T.-H., S.S. Apte and N. Hogan, Variable Stiffness Spring Actuators for Low Energy Cost Stiffness Modulation, vol. 35, no. 6, pp. 1435-1449, IEEE Transactions on Robotics, 2019. Theoretical studies suggest and experimental evidence confirms that maintaining and changing human joint stiffness by coactivated antagonistic…

Multiphase and Multivariable Linear Controllers that Account for the Joint Torques in Normal Human Walking
E.S. Altinkaynak and D.J. Braun, Multiphase and Multivariable Linear Controllers that Account for the Joint Torques in Normal Human Walking, IEEE Transactions on Biomedical Engineering, 2019. Objective: The objective of this paper is to investigate whether a small number of sequentially composed multivariable linear controllers can be…
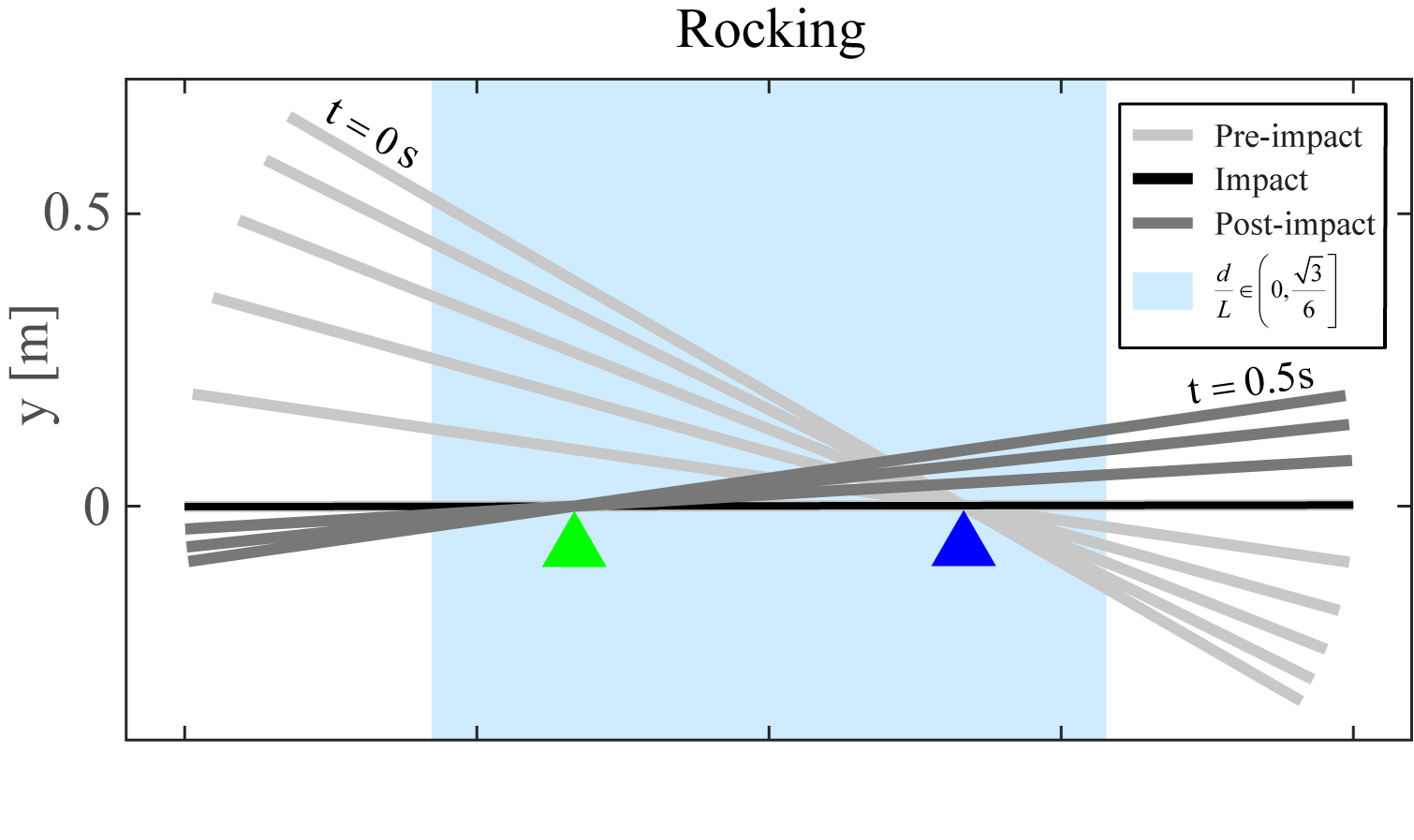
Algorithmic Resolution of Multiple Impacts in Non-smooth Mechanical Systems with Switching Constraints
Y. Li, H. Yu, and D.J. Braun, Algorithmic Resolution of Multiple Impacts in Non-smooth Mechanical Systems with Switching Constraints, IEEE International Conference on Robotics and Automation, Montreal, CA, pp. 7639-7645, May 2019. We present a differential-algebraic formulation with switching constraints to model the non-smooth dynamics of robotic…