Journal Papers
A Phase-Invariant Linear Torque-Angle-Velocity Relation Hidden in the Human Walking Data
E.S. Altinkaynak and D.J. Braun, A Phase-Invariant Linear Torque-Angle-Velocity Relation Hidden in the Human Walking Data, vol. 27, no. 4, pp. 702-711, IEEE Transactions on Neural Systems & Rehabilitation Engineering, 2019. This…
Enhancing Mobility with Quasi-passive Variable Stiffness Exoskeletons
A. Sutrisno and D.J. Braun, Enhancing Mobility with Quasi-passive Variable Stiffness Exoskeletons, IEEE Transactions on Neural Systems & Rehabilitation Engineering, vol. 27, no. 3, pp. 487-496, 2019. Highlighted research by IEEE Transactions…
Reinforcement Learning for a Class of Continuous-time Input Constrained Optimal Control Problems
F. A. Yaghmaie and D.J. Braun, Reinforcement Learning for a Class of Continuous-time Input Constrained Optimal Control Problems, Automatica, vol. 99, pp. 221-227, 2019. This paper develops a reinforcement learning framework for…
Efficiently Computable Constrained Optimal Feedback Controllers
Y. Chen, L. Roveda and D.J. Braun, Efficiently Computable Constrained Optimal Feedback Controllers, IEEE Robotics and Automation Letters, vol. 4, no. 1, pp. 121-128, 2018. This paper introduces two locally optimal feedback…
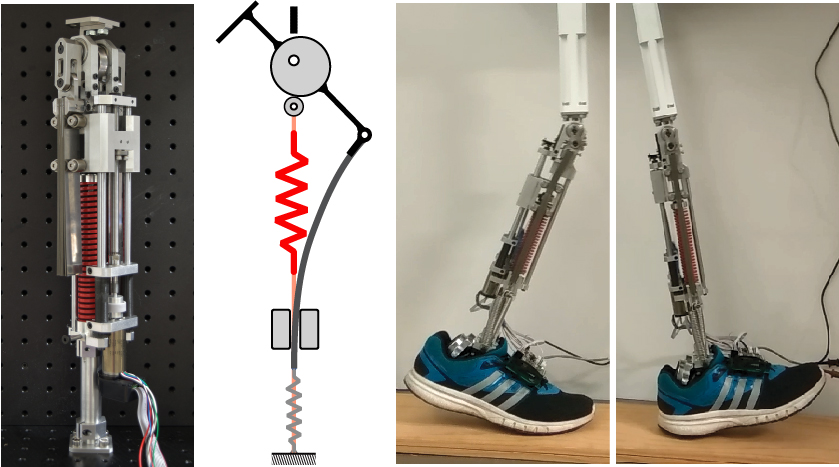
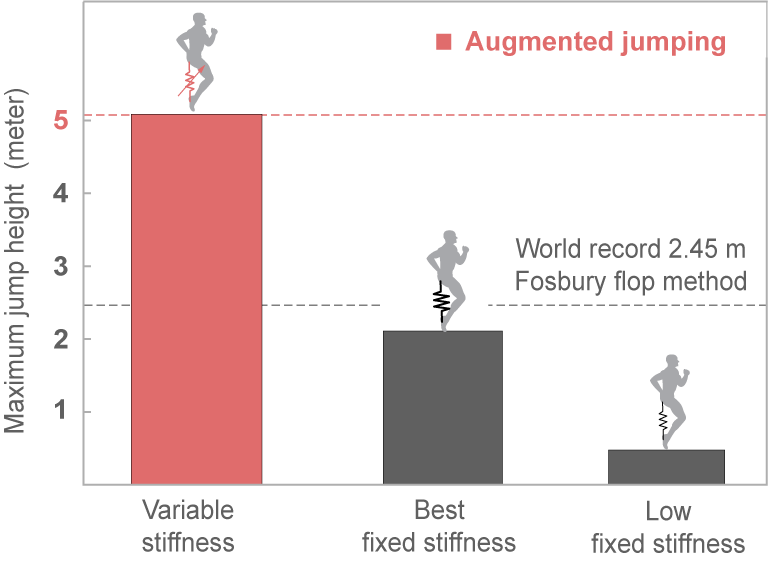
Positive-Negative Stiffness Actuators
D.J. Braun, V. Chalvet and A. Dahiya, Positive-Negative Stiffness Actuators, IEEE Transactions on Robotics, vol. 35, no. 1, pp. 162-173, 2018. This paper introduces a compliant actuator that combines tunable positive stiffness with…
Algorithmic Design of Low Power Variable Stiffness Mechanisms
V. Chalvet and D.J. Braun, Algorithmic Design of Low Power Variable Stiffness Mechanisms, IEEE Transactions on Robotics, vol. 33, no. 6, pp. 1508-1515, 2017. This paper presents an optimization-based framework for designing compliant…
Criterion for the Design of Low Power Variable Stiffness Mechanisms
V. Chalvet and D.J. Braun, Criterion for the Design of Low Power Variable Stiffness Mechanisms, IEEE Transactions on Robotics, vol. 33, no. 4, 1002-1010, 2017. This paper introduces a physical measure for identifying…
Spatio-Temporal Stiffness Optimization in Movements with Switching Dynamics
J. Nakanishi, A. Radulescu, D.J. Braun and S. Vijayakumar, Spatio-Temporal Stiffness Optimization in Movements with Switching Dynamics, Autonomous Robots, vol. 41, no. 2, pp. 273-291, 2017. This paper presents a method for…
Self-tuning Bistable Parametric Oscillator: Near-optimal Amplitude Maximization without Model Information
D.J. Braun, A. Sutas and S. Vijayakumar, Self-tuning Bistable Parametric Oscillator: Near-optimal Amplitude Maximization without Model Information, Physical Review E, 95, 012201, 2017. This paper introduces a self-tuning principle for parametrically excited…
Optimal Control of Variable Stiffness Policies: Dealing with Switching Dynamics and Model Mismatch
A. Radulescu, J. Nakanishi, D.J. Braun and S. Vijayakumar, Optimal Control of Variable Stiffness Policies: Dealing with Switching Dynamics and Model Mismatch, J. P. Laumond, N. Mansard, J.B. Lasserre, Geometric and Numerical…
Compliant Actuation for Energy Efficient Impedance Modulation
D. J. Braun, S. Apte, O. Adiyatov, A. Dahiya and N. Hogan, Compliant actuation for energy efficient impedance modulation, IEEE International Conference on Robotics and Automation, pp. 636-641, 2016. This paper…
Optimal Parametric Feedback Excitation of Nonlinear Oscillators
D.J. Braun, Optimal parametric feedback excitation of nonlinear oscillators, Physical Review Letters, 116, 044102, 2016. This paper introduces an optimal parametric feedback excitation principle that creates an adaptive resonance condition for nonlinear…