Journal Papers
Design and Control of a Parallel Elastic Actuator with Adjustable Equilibrium Position
Yixi Chen, Evangelos Chatziandreou, Chase Mathews, Beau Johnson, and David J. Braun, Design of a Parallel Elastic Actuator with Continuously Adjustable Equilibrium Position, IEEE Robotics and Automation Letters, vol. 11,…
Learning Finite-Horizon Optimal Control with Unknown Control-Affine Dynamics
Y. Chen, Y. Li and D.J. Braun, Learning Finite-Horizon Optimal Control with Unknown Control-Affine Dynamics, Systems & Control Letters, vol. 203, no. 106161, 2025. This paper introduces a model-free method…
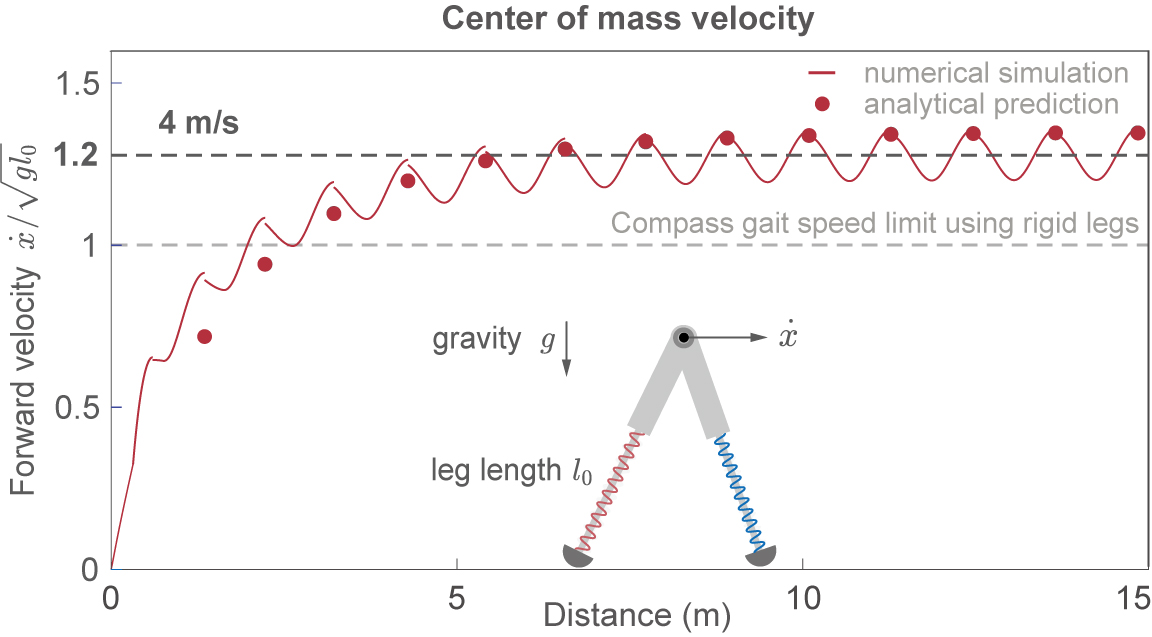
Variable Stiffness Floating Spring Leg: Performing net-zero energy cost tasks not achievable using fixed stiffness springs
S.Y. Kim and D.J. Braun, Variable Stiffness Floating Spring Leg: Performing net-zero energy cost tasks not achievable using fixed stiffness springs, IEEE Robotics and Automation Letters, vol. 8, no. 9, pp.…
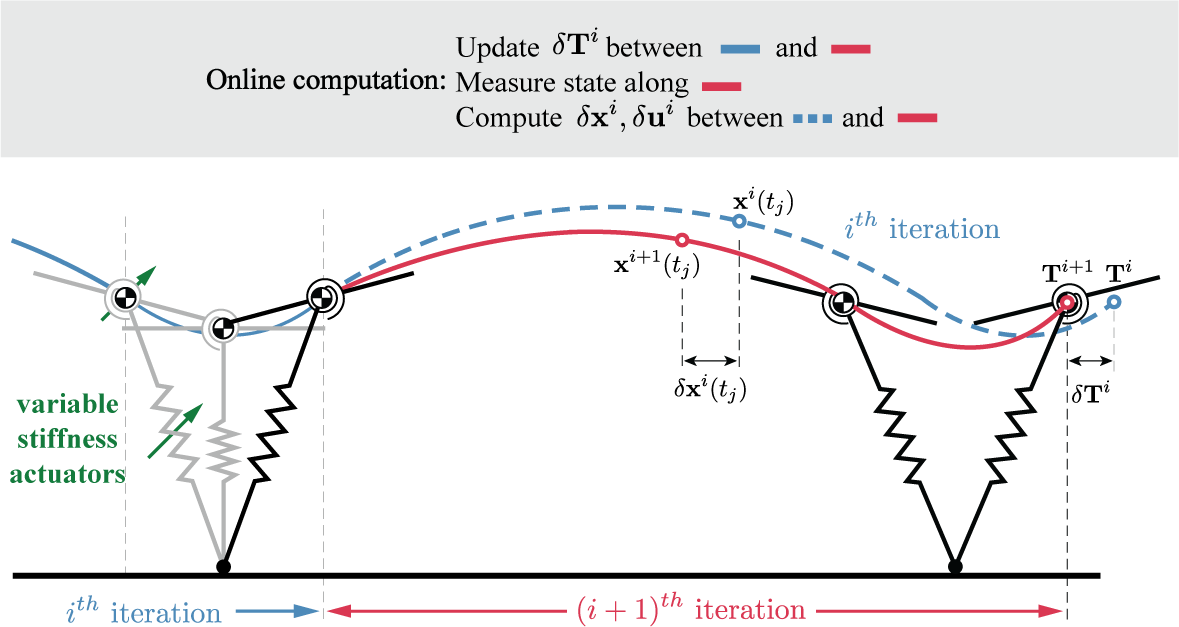
Data-Driven Iterative Optimal Control for Switched Dynamical Systems
Y. Chen, Y. Li, and D.J. Braun, Data-Driven Iterative Optimal Control for Switched Dynamical Systems, IEEE Robotics and Automation Letters, vol. 8, no. 1, pp. 296-303, 2023. This article presents…
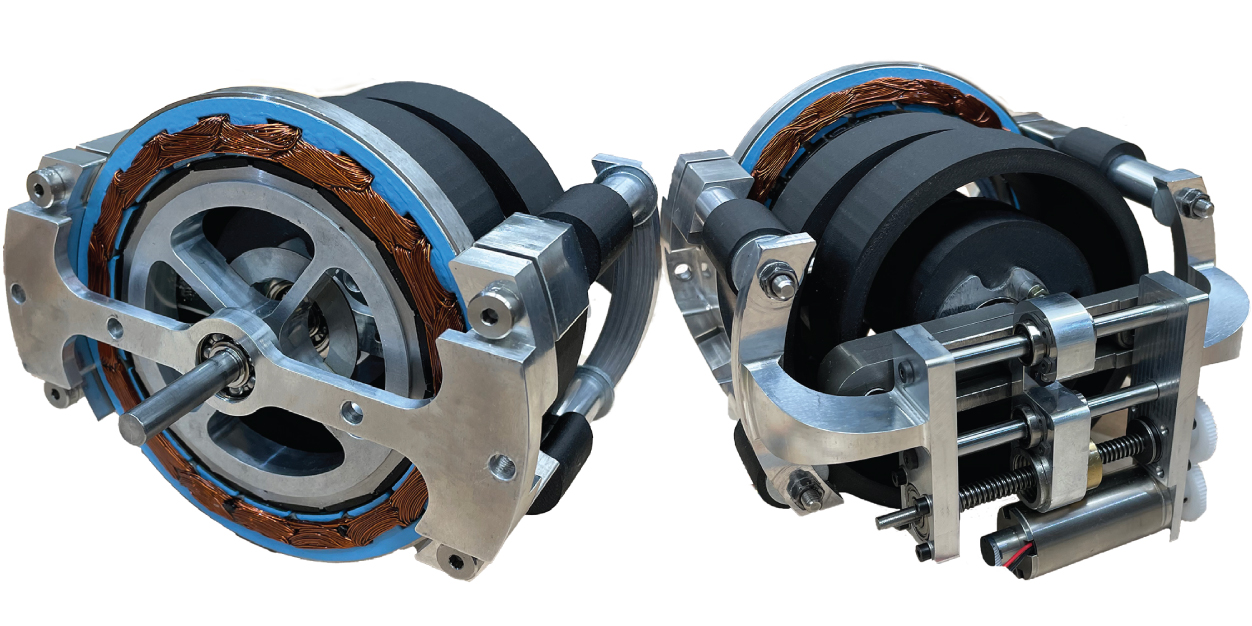
Design of Parallel Variable Stiffness Actuators
C. Mathews and D.J. Braun, Design of Parallel Variable Stiffness Actuators, IEEE Transactions on Robotics, vol. 39, no. 1, pp. 768-782, 2023. This paper introduces a parallel variable stiffness actuator (PVSA) that combines a…
Theory of Fast Walking With Human-Driven Load-Carrying Robot Exoskeletons
T. Zhang and D.J. Braun, Theory of Fast Walking With Human-Driven Load-Carrying Robot Exoskeletons, Transactions on Neural Systems and Rehabilitation Engineering, vol. 30, pp. 1971-1981, 2022. This paper develops the…
Iterative Online Optimal Feedback Control
Y. Chen and D.J. Braun, Iterative Online Optimal Feedback Control, vol. 66, no. 2, pp. 566-580, IEEE Transactions on Automatic Control, 2021. This paper introduces a data-driven feedback control method for solving finite-horizon nonlinear…
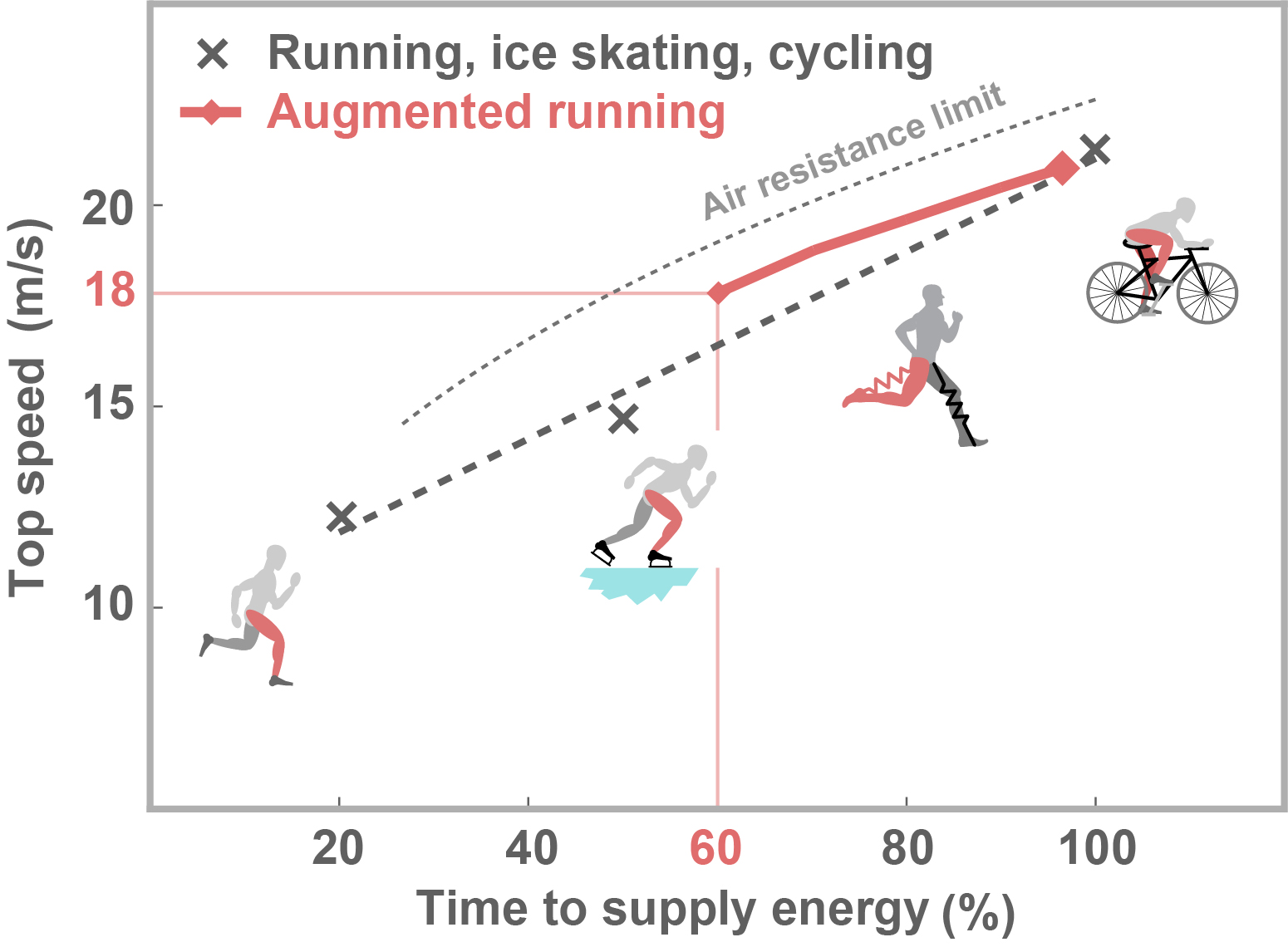
How to Run 50% Faster without External Energy
A. Sutrisno and D.J. Braun, How to Run 50% Faster without External Energy, vol. 6, no. 13, eaay1950, Science Advances, 2020. This paper shows that human running speed can be increased by more than…
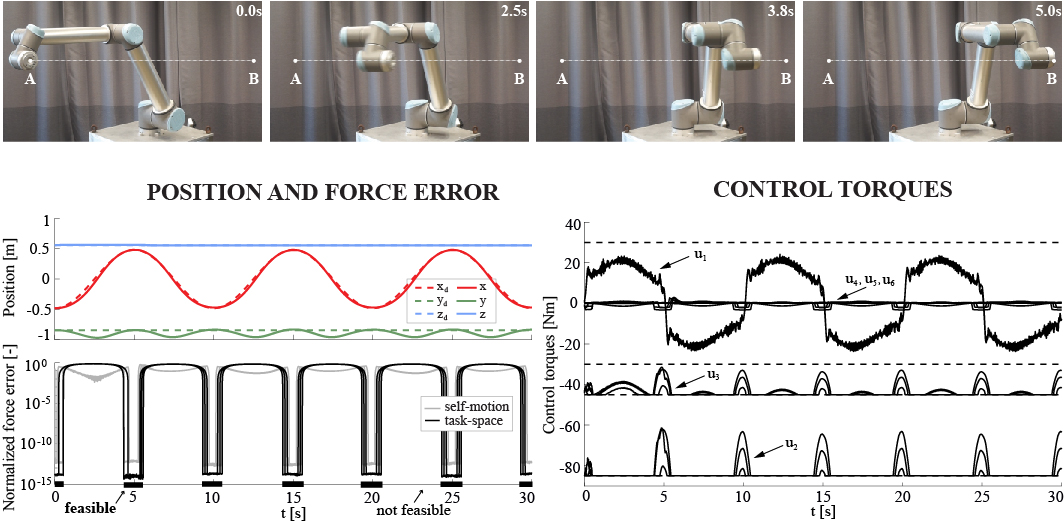
Operational Space Control under Actuation Constraints using Strictly Convex Optimization
D.J. Braun, Y. Chen, L. Li, Operational Space Control under Actuation Constraints using Strictly Convex Optimization, vol. 36, no. 1, pp. 302-309, IEEE Transactions on Robotics, 2019. This paper introduces an operational space controller…
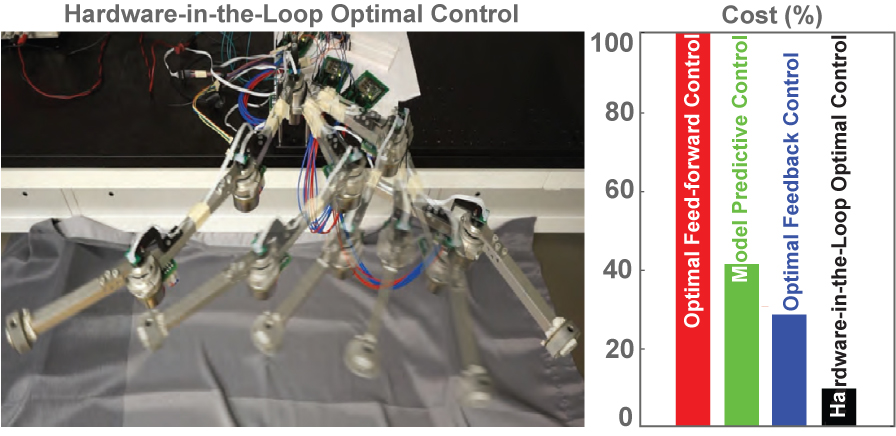
Hardware-in-the-Loop Iterative Optimal Feedback Control without Model-based Future Prediction
Y. Chen and D. J. Braun, Hardware-in-the-Loop Iterative Optimal Feedback Control without Model-based Future Prediction, vol. 35, no. 6, pp. 1419-1434, IEEE Transactions on Robotics, 2019. This paper presents a hardware-in-the-loop optimal control…
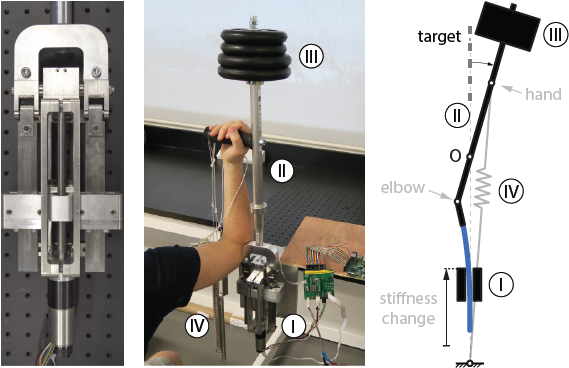
Variable Stiffness Spring Actuators for Low Energy Cost Stiffness Modulation
D.J. Braun, V. Chalvet, Chong T.-H., S.S. Apte and N. Hogan, Variable Stiffness Spring Actuators for Low Energy Cost Stiffness Modulation, vol. 35, no. 6, pp. 1435-1449, IEEE Transactions on Robotics, 2019. This paper…

Multiphase and Multivariable Linear Controllers that Account for the Joint Torques in Normal Human Walking
E.S. Altinkaynak and D.J. Braun, Multiphase and Multivariable Linear Controllers that Account for the Joint Torques in Normal Human Walking, IEEE Transactions on Biomedical Engineering, 2019. This paper investigates how human walking…