Publications
Welcome to my collection of robotics research publications. My work focuses on mechanically adaptive robotics, optimal control, actuator design, and the theory of human performance augmentation—pushing the boundaries of intelligent systems and automation. Through peer-reviewed articles, conference papers, and patents, I share insights into the challenges and breakthroughs driving robot autonomy and adaptive technology. Explore my latest research and discover how these innovations are shaping the future of robotics.
Learning Finite-Horizon Optimal Control with Unknown Control-Affine Dynamics
Y. Chen, Y. Li and D.J. Braun, Learning Finite-Horizon Nonlinear Optimal Control Policies with Unknown Control-Affine Dynamics (under review). This paper introduces a model-free method for learning finite-horizon optimal control for systems with control-affine dynamics. We approximate the time- and state-dependent optimal control policy using model-free…
Energy Minimization using Custom-Designed Magnetic-Spring Actuators
Y. Y. Fu, A.U. Kilic and D.J. Braun, Energy Minimization using Custom-Designed Magnetic-Spring Actuators, IEEE International Conference on Intelligent Robots and Systems, pp. 3534-3539, October 14 – 18, Abu Dhabi, United Arab Emirates, 2024. This study introduces an innovative actuator that resembles a motor with…
A Novel Approximation for the Spring Loaded Inverted Pendulum Model of Locomotion
A.U. Kilic and D.J. Braun, A Novel Approximation for the Spring-Loaded Inverted Pendulum Model of Locomotion, IEEE International Conference on Intelligent Robots and Systems, pp. 4315-4321, October 1 – 5, Detroit, MI, USA, 2023. The Spring-Loaded Inverted Pendulum (SLIP) is a heuristic model of robot…
Human Adaptable Variable Stiffness Springs
D. Braun, C. W. Mathews, Human Adaptable Variable Stiffness Springs, US Patent Application 18/226,204, 2023. Various examples of systems, methods, and applications of variable stiffness springs are described. In one example, a variable stiffness joint apparatus can include a torsional spring; a variable stiffness mechanism…
Variable Stiffness Floating Spring Leg: Performing net-zero energy cost tasks not achievable using fixed stiffness springs
S.Y. Kim and D.J. Braun, Variable Stiffness Floating Spring Leg: Performing net-zero energy cost tasks not achievable using fixed stiffness springs, vol. 8, no. 9, pp. 5400-5407, 2023. Sitting down and standing up from a chair and, similarly, moving heavy objects up and down between factory…
Controllable Mechanical-domain Energy Accumulators
S.Y. Kim and D.J. Braun, Controllable Mechanical-domain Energy Accumulators, IEEE International Conference on Robotics and Automation, London, United Kingdom, pp. 7359-7364, 2023. Springs are efficient in storing and returning elastic potential energy but are unable to hold the energy they store in the absence of an…
Design of a Variable Stiffness Spring with Human-Selectable Stiffness
C. Mathews and D.J. Braun, Design of a Variable Stiffness Spring with Human-Selectable Stiffness, IEEE International Conference on Robotics and Automation, London, United Kingdom, pp. 7385-7390, 2023. Springs are commonly used in wearable robotic devices to provide assistive joint torque without the need for motors and…
Novel Spring Mechanism Enables Iterative Energy Accumulation under Force and Deformation Constraints
C. Dempsey and D.J. Braun, Novel Spring Mechanism Enables Iterative Energy Accumulation under Force and Deformation Constraints, IEEE International Conference on Robotics and Automation, London, United Kingdom, pp. 7391-7397, 2023. Springs can provide force at zero net energy cost by recycling negative mechanical work to benefit…
Method and Apparatus for Human Augmentation and Robot Actuation
D. Braun, C. W. Mathews, Method and apparatus for human augmentation and robot actuation, US Patent 17/872,164, 2022. The present disclosure relates to a parallel variable stiffness actuator. The parallel variable stiffness actuator can comprise a spring and a variable-stiffness mechanism. The variable-stiffness mechanism can…
Variable Stiffness Mechanisms for low Energy Cost Stiffness Modulation
D. Braun, S. Kim, Variable Stiffness Mechanisms for low Energy Cost Stiffness Modulation, US Patent Application 17/506,164, 2021. Disclosed herein is a variable-stiffness floating spring mechanism. The variable-stiffness floating spring mechanism can change its stiffness without changing an energy stored by a spring. The variable-stiffness…
Method and Apparatus for Augmented Locomotion
D. Braun, A. Sutrisno, and T. Zhang, Method and Apparatus for Augmented Locomotion, US Patent 17/127,080, 2020. Provided are apparatuses for augmenting human speed, human-driven compliant mechanisms, artificial limbs to augment human movement, and the like. The apparatuses can include variable stiffness mechanisms including springs…
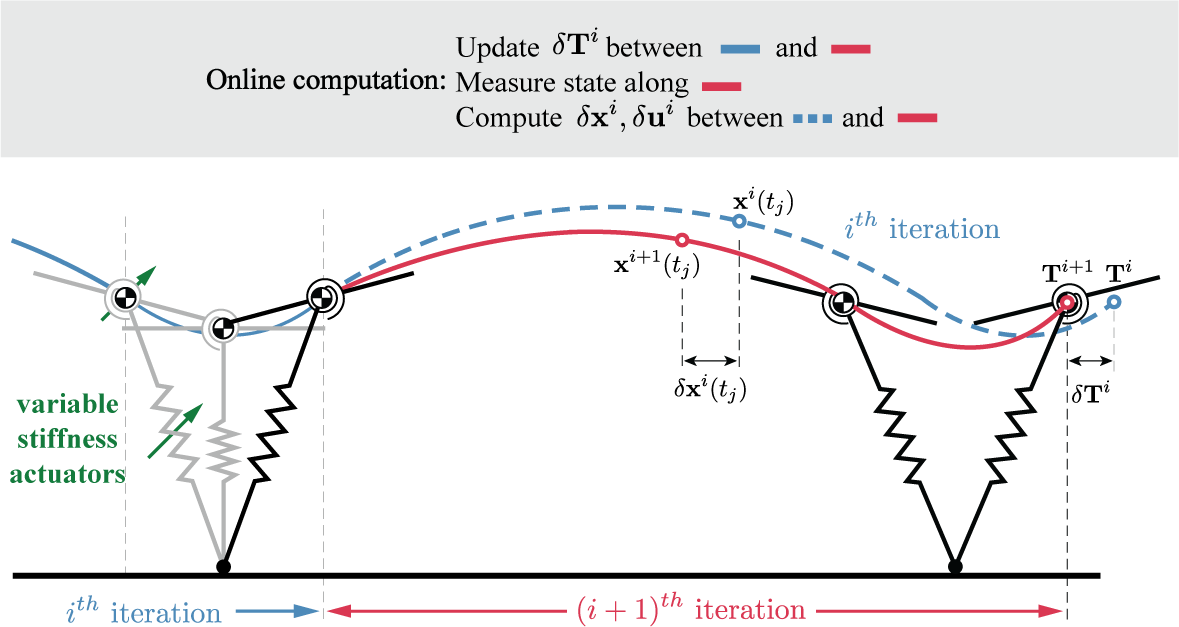
Data-Driven Iterative Optimal Control for Switched Dynamical Systems
Y. Chen, Y. Li, and D.J. Braun, Data-Driven Iterative Optimal Control for Switched Dynamical Systems, IEEE Robotics and Automation Letters, vol. 8, no. 1, pp. 296-303, 2023. This article presents a data-driven algorithm to compute optimal control inputs for input-constrained nonlinear optimal control problems with…