S. Kim, T. Zhang, and D.J. Braun, Variable Stiffness Springs for Energy Storage Applications, IEEE International Conference on Robotics and Automation, Paris, FR, 2020.
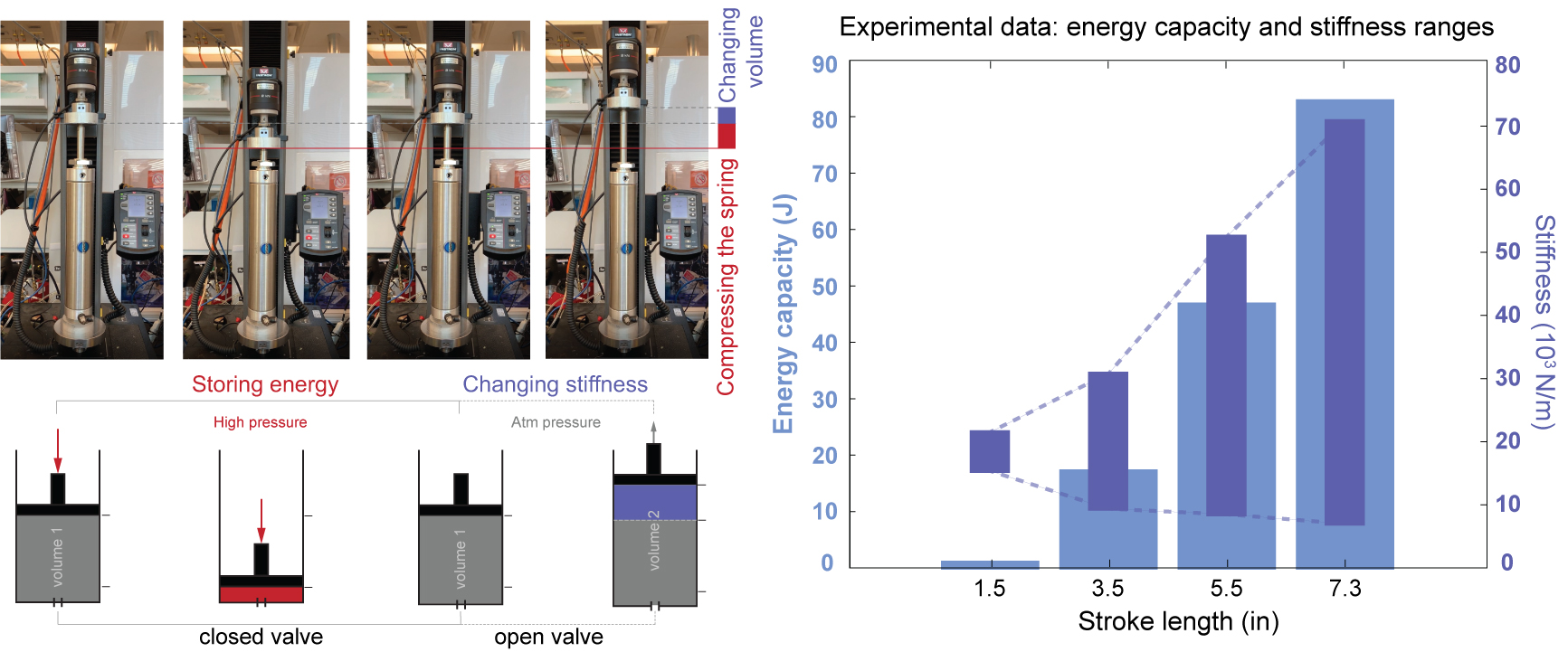
This paper challenges the widely accepted trade-off between stiffness and energy storage in spring design. While conventional springs and state-of-the-art variable stiffness actuators lose energy storage capacity as stiffness increases, the authors show theoretically and experimentally that this limitation is not fundamental. Using a controllable-volume air spring, they demonstrate that stiffness and energy storage capacity can both increase simultaneously under the right design conditions.
Why it matters: Overcoming the stiffness–energy trade-off opens the door to variable stiffness actuators with far greater capability. Such designs could power exoskeletons and robots that support demanding tasks like jumping, running, and weight-bearing, enabling human performance augmentation and more versatile robotic systems.