Understanding the principles underlying human motion is the first step in developing robots for human assistance and augmentation; exoskeletons for rescue operations, or to assist in case of locomotor impairment due to illness or injury. In this research, we investigate approximations of the complex biological locomotion controller that provides simultaneous limb coordination and body stabilization for stable locomotion. By leveraging bio-inspired locomotion control, we aim to enhance robot locomotion and improve human movement efficiency in real-world applications.
Reverse Engineering Impedance Controllers from Human Locomotion Data
The objective of this research is to investigate whether a small number of sequentially composed multivariable linear controllers can be used to recover a defining relation between the joint torques, angles, and velocities hidden in the walking data of multiple human subjects. Using the data of seven healthy subjects, we show that the aforementioned relation can be well approximated by four sequentially composed and independently activated multivariable linear controllers. We further show that each controller is associated with one of the four phases of the gait cycle, separated by toe-off and heel-strike. The proposed controller generalizes previously developed multiphase single variable, and single phase multivariable controllers, to a multiphase multivariable controller that better explains the walking data of multiple subjects, and better generalizes to new subjects. Our result provides strong support to extend previously developed decoupled single-joint single-variable controllers to coupled multi-joint multivariable controllers for the control of walking robots as well as human assistive and augmentation devices.
- E.S. Altinkaynak and D.J. Braun, Multiphase and Multivariable Linear Controllers that Account for the Joint Torques in Normal Human Walking, IEEE Transactions on Biomedical Engineering, vol. 67, no. 6, pp. 1573-1584, 2020.

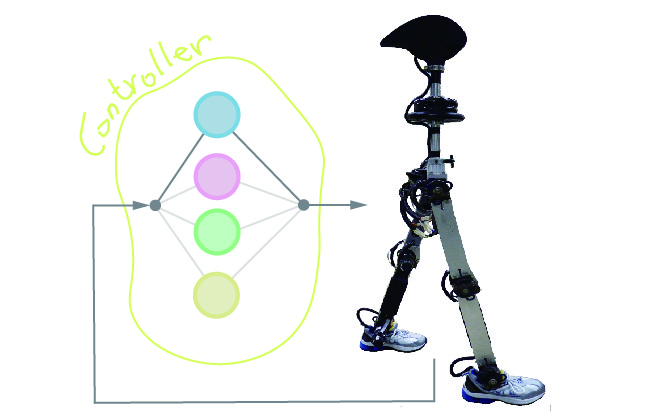
Switching Impedance Control for Legged Locomotion
We hypothesized that an optimization-based generalization of single-joint switching impedance controllers used for limb coordination in prosthetic devices is capable of resolving the complex coordination task underlying bipedal locomotion including not only limb coordination in prosthetic devices but also upper-body stabilization in walking robots. Numerical simulations and experiments conducted on an anthropomorphic biped robot provide strong support for this hypothesis.
- D.J. Braun, J.E. Mitchell, and M. Goldfarb, Actuated Dynamic Walking in a Seven-Link Biped Robot, IEEE/ASME Transactions on Mechatronics, vol. 17, no. 1, pp. 147-156, 2012.
- D.J. Braun and M. Goldfarb, A Control Approach for Actuated Dynamics Walking in Biped Robots, IEEE Transactions on Robotics, vol. 25, no. 6, pp. 1292-1303, 2009.