D.J. Braun, Y. Chen, L. Li, Operational Space Control under Actuation Constraints using Strictly Convex Optimization, vol. 36, no. 1, pp. 302-309, IEEE Transactions on Robotics, 2019.
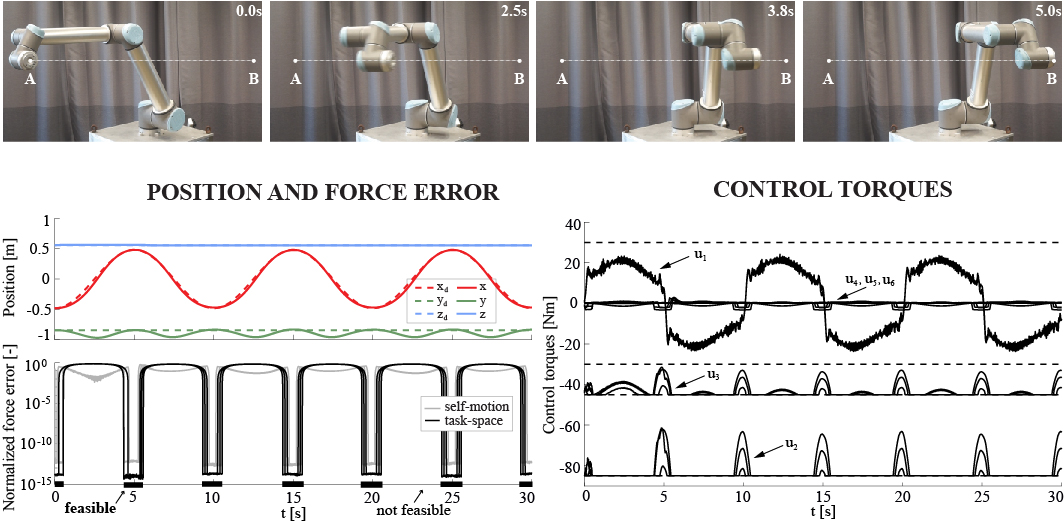
This paper introduces an operational space controller that accounts for actuator limitations and works with fully actuated, underactuated, and overactuated systems. The controller computes inputs through constrained quadratic programs that are strictly convex and require a minimal number of decision variables, ensuring efficient and reliable computation. The method is validated in both simulations and experiments with torque-controlled robots.
Why it matters: Traditional operational space control methods often ignore actuator limits, reducing their practicality for real robots. By rigorously incorporating actuation constraints, this approach enables more reliable tracking, stabilization, and motion coordination, broadening the applicability of operational space control to real-world robotic systems.