D.J. Braun, V. Chalvet and A. Dahiya, Positive-Negative Stiffness Actuators, IEEE Transactions on Robotics, vol. 35, no. 1, pp. 162-173, 2018.
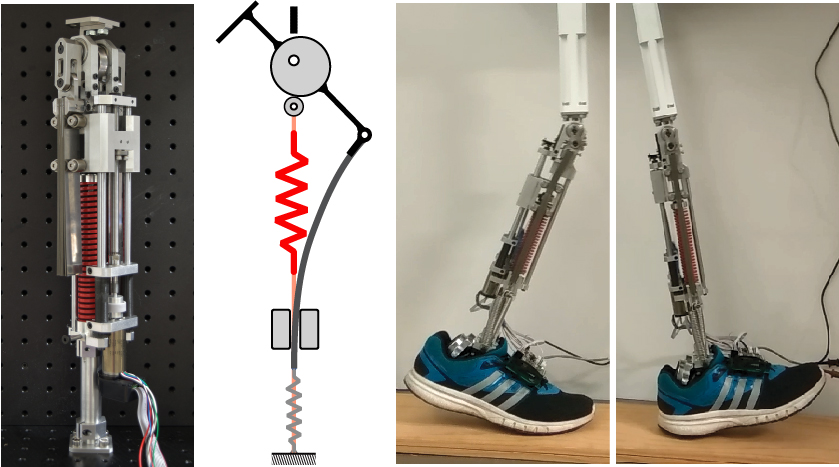
This paper introduces a compliant actuator that combines tunable positive stiffness with passive negative stiffness. Unlike conventional variable stiffness actuators that require two motors or complex closed-loop control, this design achieves both stiffness modulation and equilibrium position control using a single motor. The prototype demonstrates how positive-negative stiffness mechanisms enable low-power actuation and simplify control while extending actuator capability.
Why it matters: Traditional actuators are limited to positive stiffness, restricting efficiency and adaptability. By leveraging both positive and negative stiffness, this design reduces complexity and energy use, opening new possibilities for compact, efficient actuators in robotics and assistive devices.