A. Sutrisno and D.J. Braun, Enhancing Mobility with Quasi-passive Variable Stiffness Exoskeletons, IEEE Transactions on Neural Systems & Rehabilitation Engineering, vol. 27, no. 3, pp. 487-496, 2019. Highlighted research by IEEE Transactions on Neural Systems & Rehabilitation Engineering.
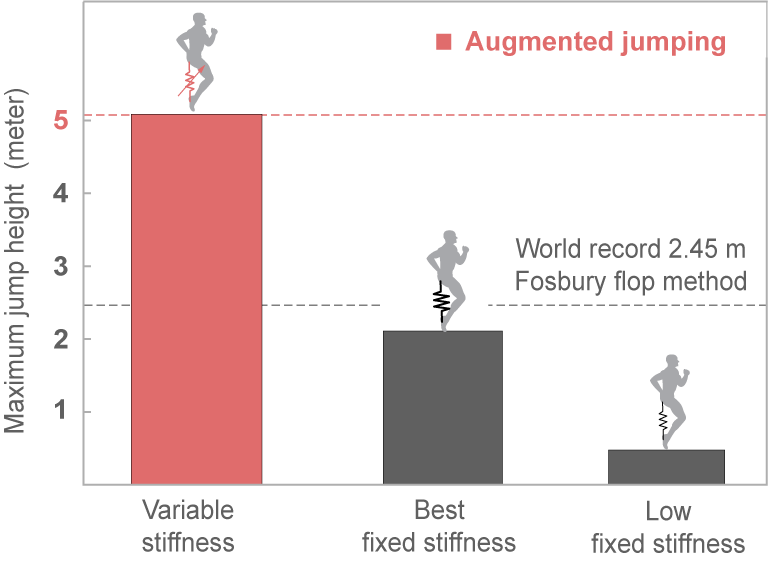
This paper introduces a quasi-passive variable stiffness exoskeleton designed to enhance human mobility beyond the limits of fixed stiffness devices. Unlike traditional exoskeletons, which are constrained by limb deflection and muscle force, the proposed design allows users to accumulate greater kinetic energy independent of these biological limits. The exoskeleton provides variable stiffness without performing mechanical work, enabling improved mobility while conserving energy.
Why it matters: Fixed stiffness exoskeletons are limited by human biomechanics, restricting their effectiveness in demanding tasks. Quasi-passive variable stiffness exoskeletons overcome this barrier, offering a path toward devices that can increase speed and reduce energy cost of motion for applications in rehabilitation, industry, and defense.