L. Li and D.J. Braun, Constrained Feedback Control by Prioritized Multi-objective Optimization, IEEE International Conference on Robotics and Automation, Montreal, CA, pp. 9496-9501, May 2019.
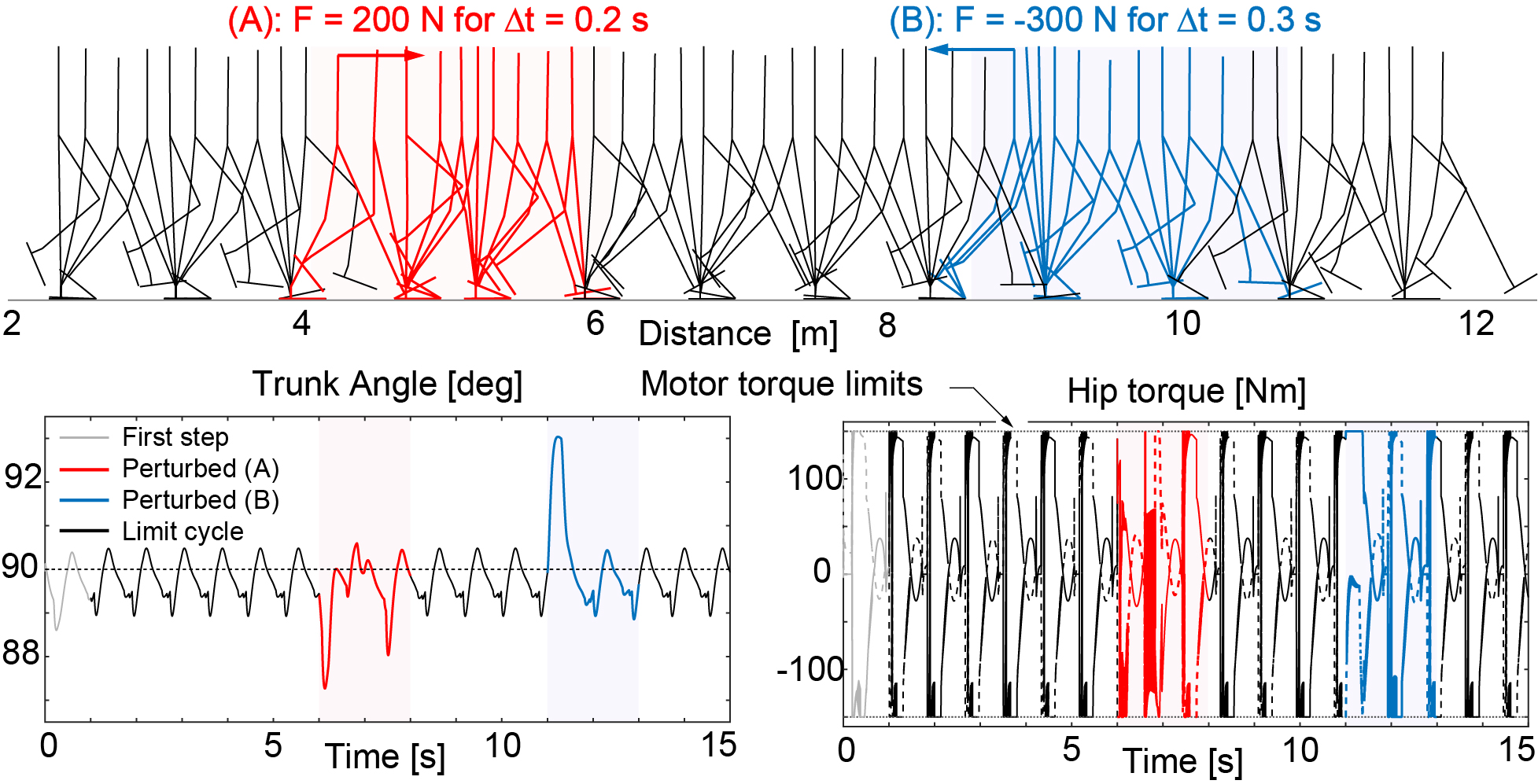
This paper introduces a feedback control framework based on prioritized multi-objective optimization that rigorously handles input saturation constraints. Unlike traditional approaches, the method extends beyond inverse dynamics to include impedance control—even in simple forms that do not require a dynamic model. The formulation supports multiple priority levels and is demonstrated through simulations of stable locomotion in a planar biped robot.
Why it matters: Robots often face competing control objectives and actuator limits that standard methods cannot fully address. This model-free, prioritized feedback control framework provides a flexible and practical way to balance multiple objectives under real-world constraints, advancing reliable locomotion and interaction control.