C.W. Mathews and D.J. Braun, Parallel Variable Stiffness Actuators, IEEE-RSJ International Conference on Intelligent Robots and Systems, pp. 8225-8231, 2021.
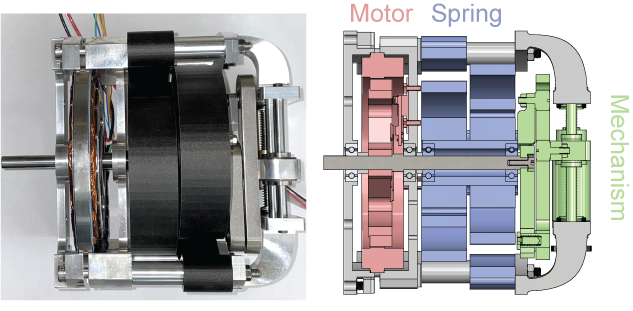
This paper introduces the Parallel Variable Stiffness Actuator (PVSA), a compliant actuator that combines a variable stiffness spring with a direct-drive motor. The compact design achieves both high-fidelity force control and controllable energy storage. Unlike series elastic or conventional variable stiffness actuators, PVSAs avoid bandwidth limitations and enable resonant energy accumulation even when spring deformation and load motion are constrained.
Why it matters: PVSAs allow smaller motors to deliver peak power comparable to larger ones, without sacrificing control precision. This makes them especially useful for robots and exoskeletons performing dynamic tasks such as walking, jumping, running, or swimming, where both efficiency and adaptability are critical.