Y. Chen, Y. Li, and D.J. Braun, Data-Driven Iterative Optimal Control for Switched Dynamical Systems, IEEE Robotics and Automation Letters, vol. 8, no. 1, pp. 296-303, 2023.
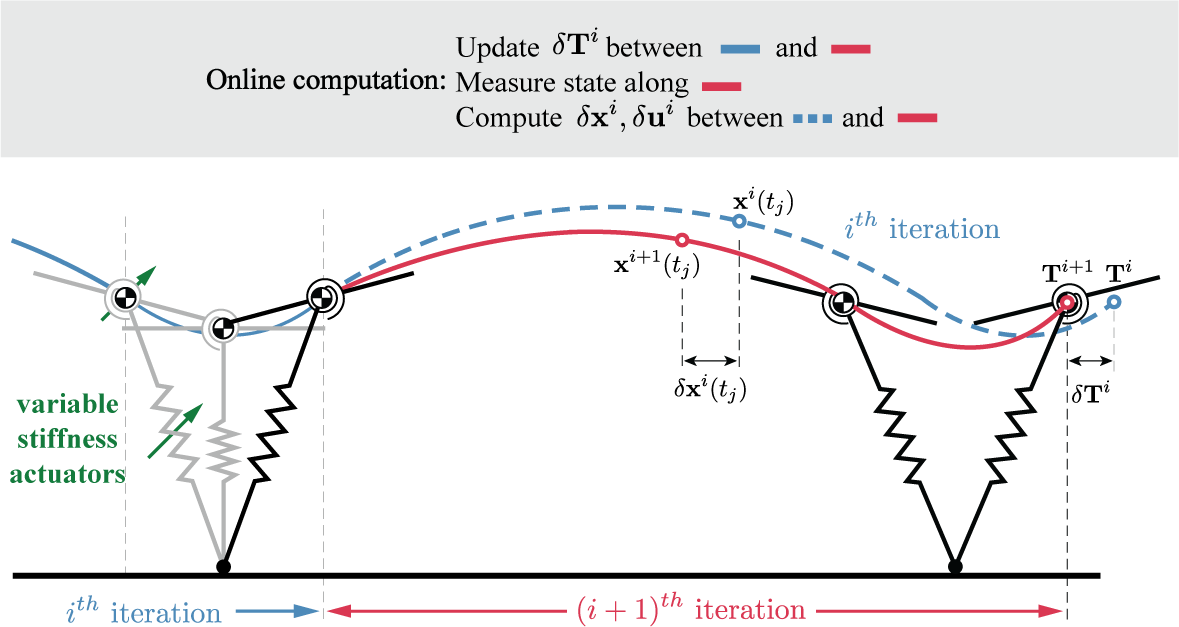
This article presents a data-driven algorithm for solving nonlinear optimal control problems with input constraints and switched dynamics. The method addresses multi-stage problems where both the control inputs and the switching times must be determined. Instead of relying on potentially inaccurate model predictions, the algorithm estimates cost and computes control inputs directly from measured trajectories of the system. This approach reduces the impact of model bias, particularly in under-actuated and unstable systems. The effectiveness of the method is demonstrated with a simulated hopping robot.
Why it matters: Many robotic systems are difficult to model precisely, especially when they are under-actuated and unstable. By using real trajectory data rather than imperfect models, this algorithm makes it possible to achieve real-time optimal control in challenging scenarios, expanding the reliability and performance of robots in dynamic environments.