Actuators are one of the key components of robots; they are used in industrial robots, humanoids, but also automobiles. We focus on developing compliant actuators which consist of springs attached in series or parallel with motors. The most common types of compliant actuators are series elastic actuators (SEAs) and variable stiffness actuators (VSAs). We invent and explore the benefits of new types of mechanically-adaptive compliant actuators.
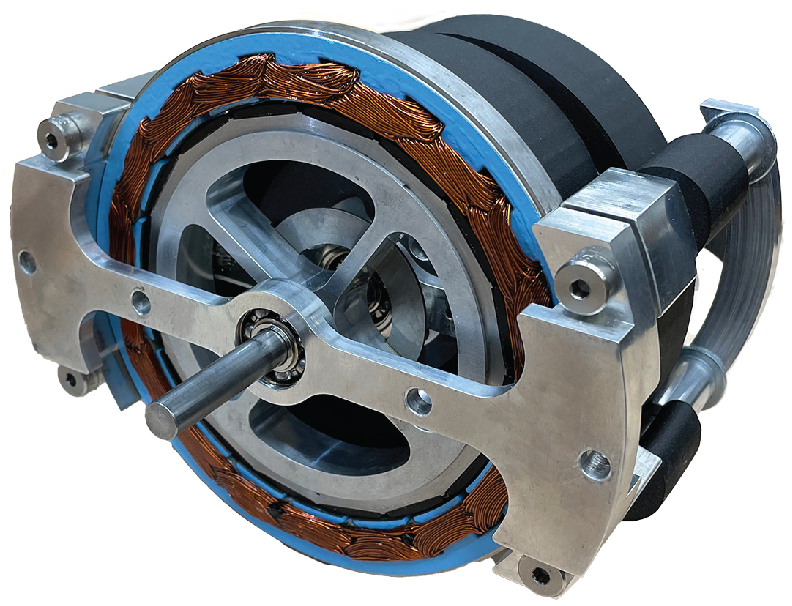
Custom-designed Magnetic Spring Actuators
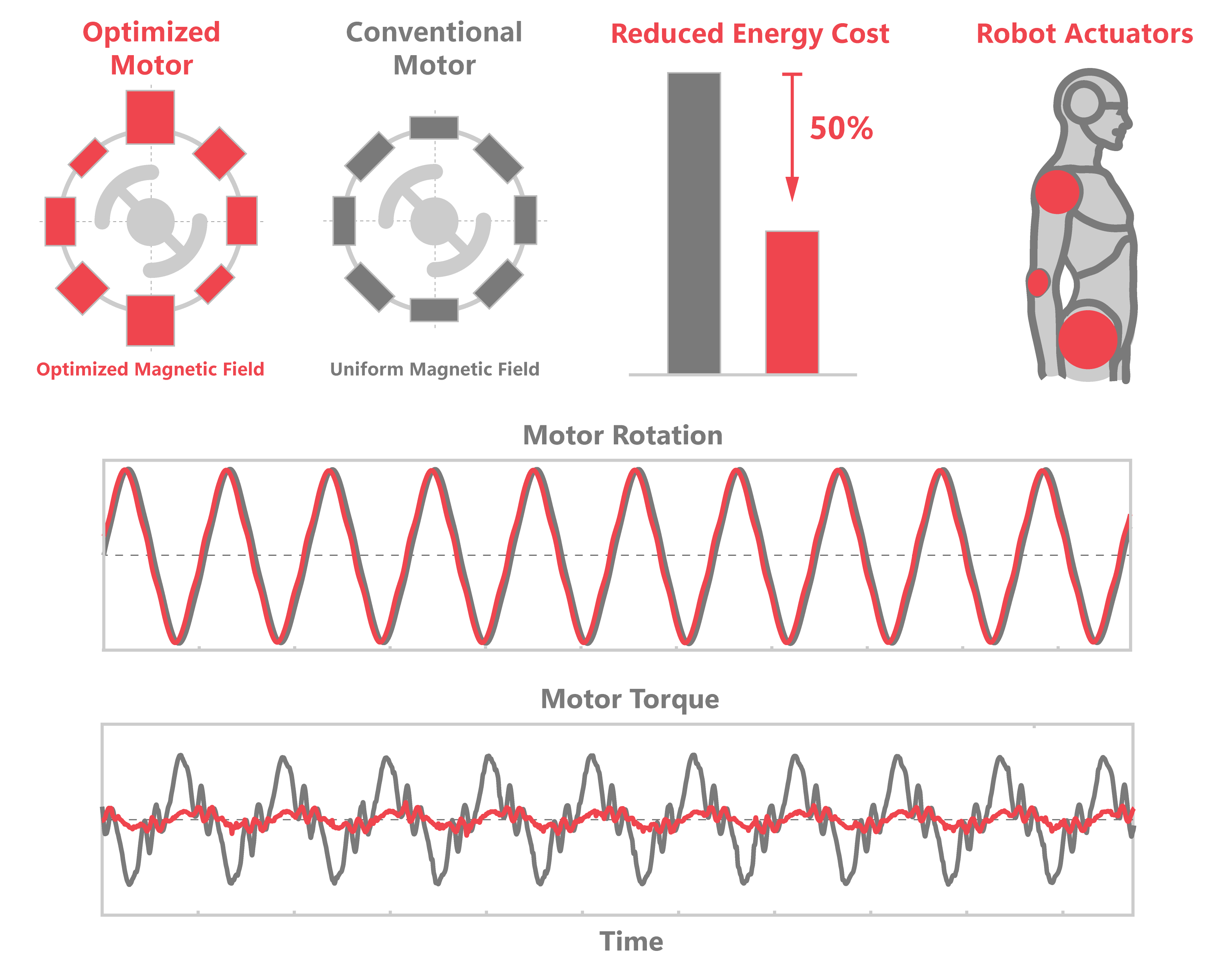
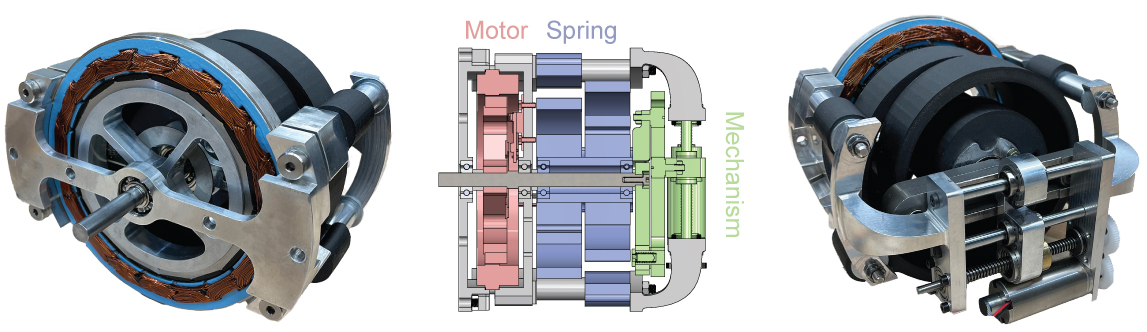
Robots face a persistent challenge: motors consume energy not only when performing useful work but also when holding a position or braking, where no meaningful work is done. This inefficiency becomes especially critical in repetitive tasks like pick-and-place operations or oscillatory motions, where a significant amount of energy is wasted for only a small amount of useful work. Our research introduces a novel solution—combining motors with custom-designed magnetic springs that leverage non-uniform magnetic fields optimized for specific tasks. These actuators are precisely tailored to match the dynamics of individual robotic operations, significantly reducing the motor’s torque and energy demands. Experiments show up to 50% energy savings, marking a significant step toward more energy-efficient robotics. By addressing this critical limitation, these actuators open new possibilities for deploying sustainable, high-performance robots in a broad range of industrial settings while reducing the energy consumption of robots across various industries.
- Y. Y. Fu, A. U. Kilic, and D. J. Braun, Energy Minimization using Custom-Designed Magnetic-Spring Actuators, IEEE International Conference on Intelligent Robots and Systems, 2024.
Parallel Variable Stiffness Actuators (PVSA)
In this research, we explore the design of a new type of compliant actuator named the Parallel Variable Stiffness Actuator (PVSA) which consists of a variable stiffness spring placed in parallel with a direct-drive motor. Parallel variable stiffness actuators provide (i) high-fidelity force control and (ii) controllable energy storage, as they inherit the benefits of direct-drive motors and variable stiffness springs. We present a compact design of the PVSA using a flat motor connected to an adjustable mechanical advantage torsional spring. We show that PVSAs are (1) not subject to the fundamental force control bandwidth limitation of series elastic and variable stiffness actuators, and (2) enable resonant energy accumulation despite the limited deformation of the spring and the constrained motion of the load attached to the actuator. The latter differentiates parallel variable stiffness actuators from fixed-stiffness parallel elastic actuators. PVSAs may be used with smaller direct-drive motors to match the peak power of larger motors without compromising force control fidelity. PVSAs may be used in industrial robots to provide both precise manipulation and zero-energy cost weight-bearing. PVSAs may be also used to implement resonant forcing under joint angle limitations in walking, jumping, running, and swimming robots, or robotic exoskeletons used to augment human motion.
- M. W. Chase and D. Braun, Design of Parallel Variable Stiffness Actuators, IEEE Transactions on Robotics, 2022.
Variable Stiffness Springs (VSS)
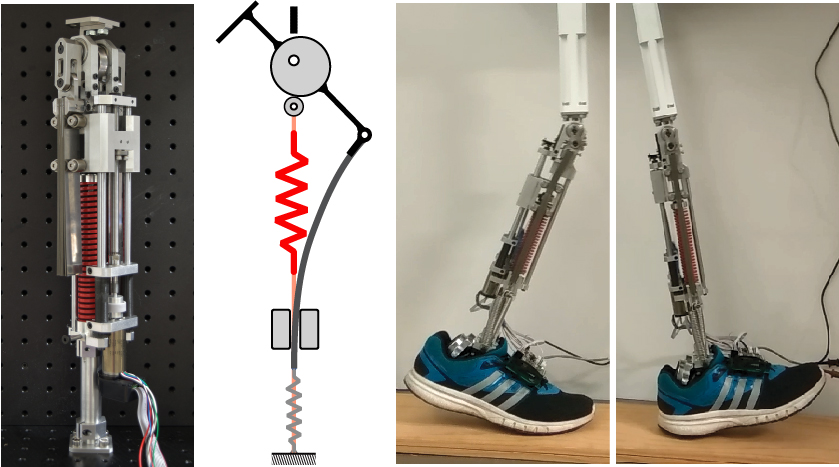
Theoretical studies suggest and experimental evidence confirms that maintaining and changing human joint stiffness by coactivated antagonistic muscles are metabolically expensive, even if muscles do not perform net mechanical work. Based on this observation, we conjecture that effective human augmentation can be achieved by actuators operated in parallel to human joints, even if these actuators only supplement joint stiffness without doing net mechanical work. In this research, we developed a variable-length leaf-spring actuator capable of large-range stiffness modulation. The key feature of the actuator is that it provides intrinsically low-energy-cost stiffness modulation even for large output deflection, by keeping the force on the driving motor low. Variable stiffness actuators use two motors to provide both stiffness and equilibrium position modulation as they are designed to do net mechanical work. The proposed actuator conceptually differs from variable stiffness actuators because first, it uses a single motor to only provide stiffness modulation, second, it does not provide equilibrium position modulation, and third, unless externally loaded, it cannot do net mechanical work. Using this actuator, we demonstrate stiffness augmentation during human–machine collaboration in challenging postural stabilization and weight-bearing tasks. Our results indicate that the proposed actuator can be used to complement a biological system by restoring or extending its functionality with low energy cost, and that variable stiffness spring actuators could effectively augment humans by doing no or a limited amount of mechanical work.
- D. Braun, V. Chalvet, T.H. Chong, S.S. Apte, and N. Hogan, Variable Stiffness Spring Actuators for Low Energy Cost Human Augmentation, IEEE Transactions on Robotics, vol. 35, no. 6, pp. 1435-1449, 2019.
Positive Negative Stiffness Actuators (PNSA)
Compliant actuators typically possess a tunable positive stiffness characteristic to generate restoring force upon displacement. These actuators are similar to adaptive springs that use two independent motor units or closed-loop control to change both their equilibrium position and stiffness. The introduction of negative stiffness, in combination with tunable positive stiffness, may reduce the complexity and extend the capability of these actuators in unexpected ways. In this research, we explore novel designs of compliant actuators that employ a passive negative stiffness mechanism in conjunction with an effectively tunable positive stiffness mechanism. We show that such an actuator can enable open-loop stiffness modulation and equilibrium position control using a single motor unit, as opposed to more conventional variable stiffness and series elastic actuators.
- D. Braun, V. Chalvet, and A. Dahiya Positive-Negative Stiffness Actuators, IEEE Transactions on Robotics, vol. 35, no. 1, pp. 162-173, 2019.
Computational Design of Variable Stiffness Actuators
Prior research on robot actuator design identified significant limitations of experience-based design methods used to develop variable stiffness mechanisms, actuators, and robots. In this research, we develop an optimization-based computational framework for the design of variable stiffness mechanisms, actuators, and robots. The core ingredient of this framework is the mathematical formulation of the design problem which is computationally solved to identify intrinsically low-power variable stiffness mechanism designs.
- V. Chalvet and D.J. Braun, Algorithmic Design of Low Power Variable Stiffness Mechanisms, IEEE Transactions on Robotics, vol. 33, no. 6, pp. 1508-1515, 2017.
- V. Chalvet and D.J. Braun, Criterion for the Design of Low Power Variable Stiffness Mechanisms, IEEE Transactions on Robotics, vol. 33, no. 4, pp. 1002-1010, 2017.