We work on the theory of mechanically adaptive robot exoskeletons, to create unpowered but mechanically-adaptive devices and devices driven by small actuators (for example, a small electric motor), that provide the human with capabilities beyond those of an unassisted human, to an extent previously thought to require large externally powered actuators (for example, large electric motors).
Unpowered mechanical devices are already used for human performance enhancement; a person can travel much farther and faster on a bicycle than they can on foot. The exoskeletons we work on go beyond such familiar energetically passive devices by integrating actively controlled energy storage, in the form of springs of controllable stiffness. In our robots, the amount of energy stored in a spring of controllable stiffness can be decoupled from the deformation of the spring. This new capability could advance human and robot mobility.
Running with a Variable Stiffness Spring Leg
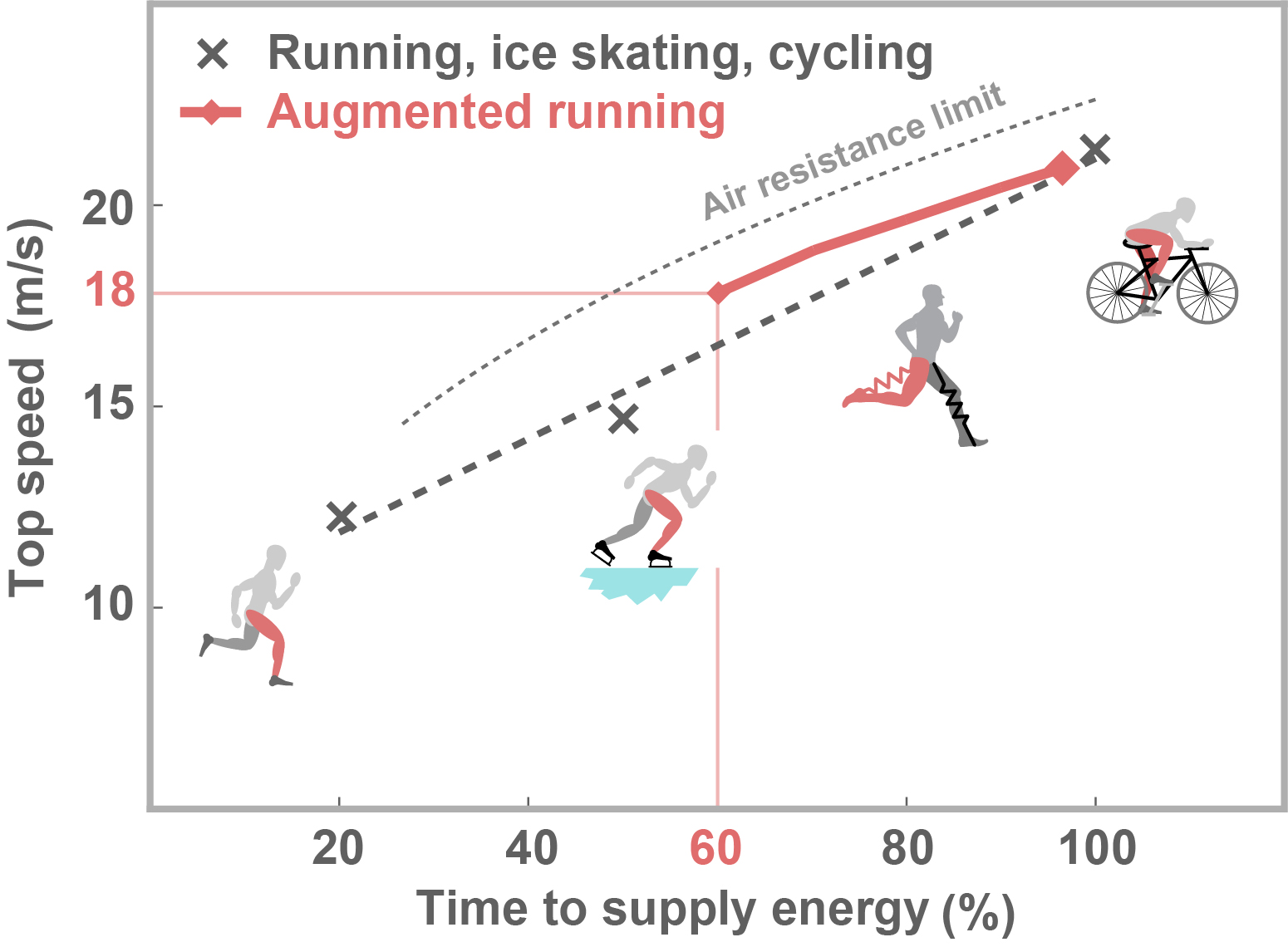
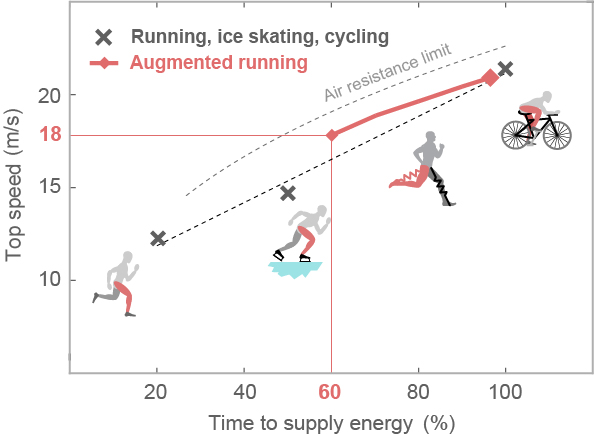
Explore the thrilling potential of human speed with our analysis of top speeds in running, ice skating, cycling, and running enhanced by variable stiffness spring legs. The figure below plots these top speeds against the time available for the legs to supply energy in each motion. Naturally, in running, legs supply energy only when in contact with the ground—about 20% of the time and not during flight. However, with the aid of a variable stiffness spring, a human could theoretically supply energy for up to 96% of the leg swing. Even at a lower efficiency of 60%, this innovative exoskeleton could enable speeds of 18 m/s, a 50% increase over the natural running top speed of 12 m/s, as posited by our theoretical model.
- A. Sutrisno and D. Braun, How to run 50% faster without external energy, Science Advances, 6(13), eaay1950, 2020.
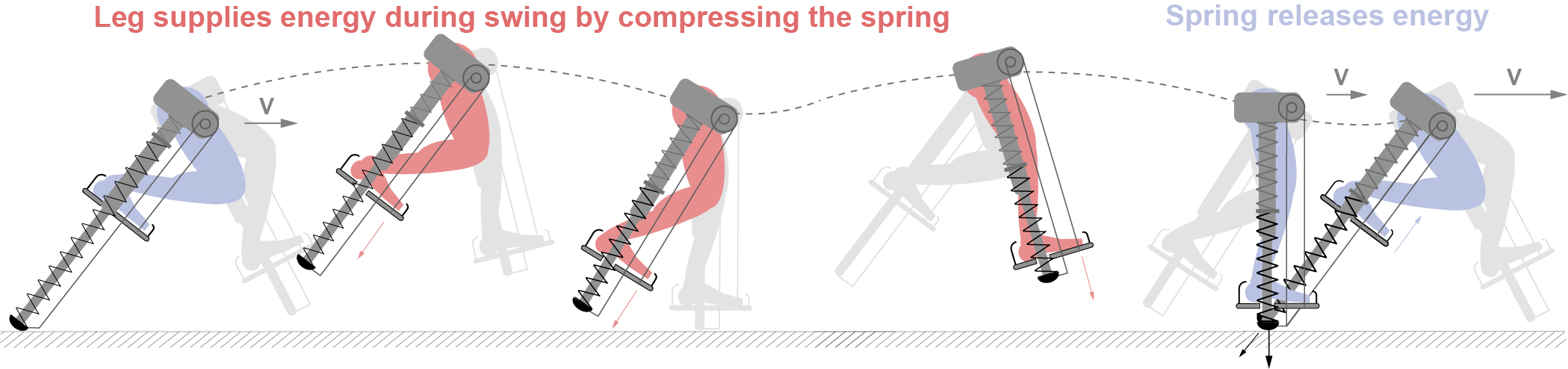
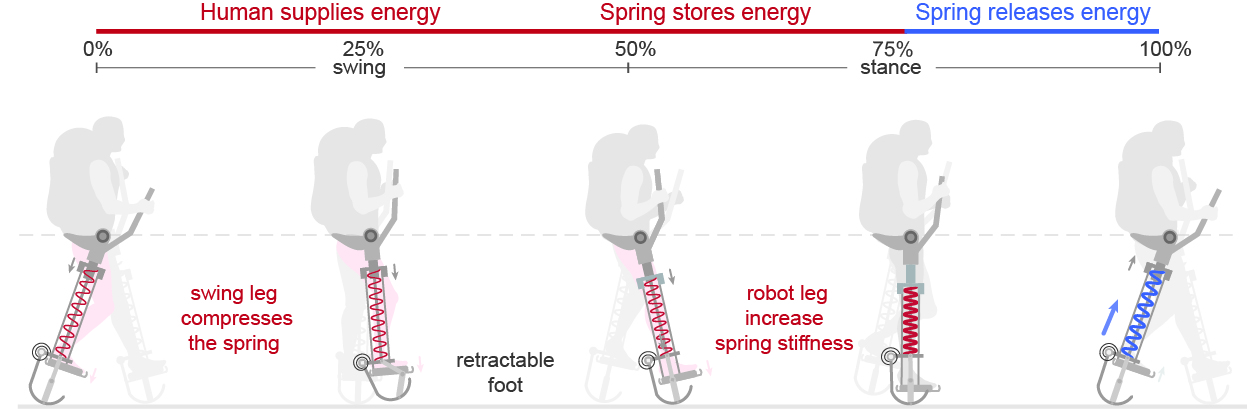
The figure below shows the method of augmented running using a variable stiffness spring where the human compresses the spring when the leg is in the air while the spring releases the energy stored when the leg touches the ground.
The video below shows a thought experiment of a 100-meter race, where a world-class athlete augmented with the variable stiffness spring leg exoskeleton races against the 9.58 seconds world record set by the Jamaican sprinter Usain Bolt in 2009.
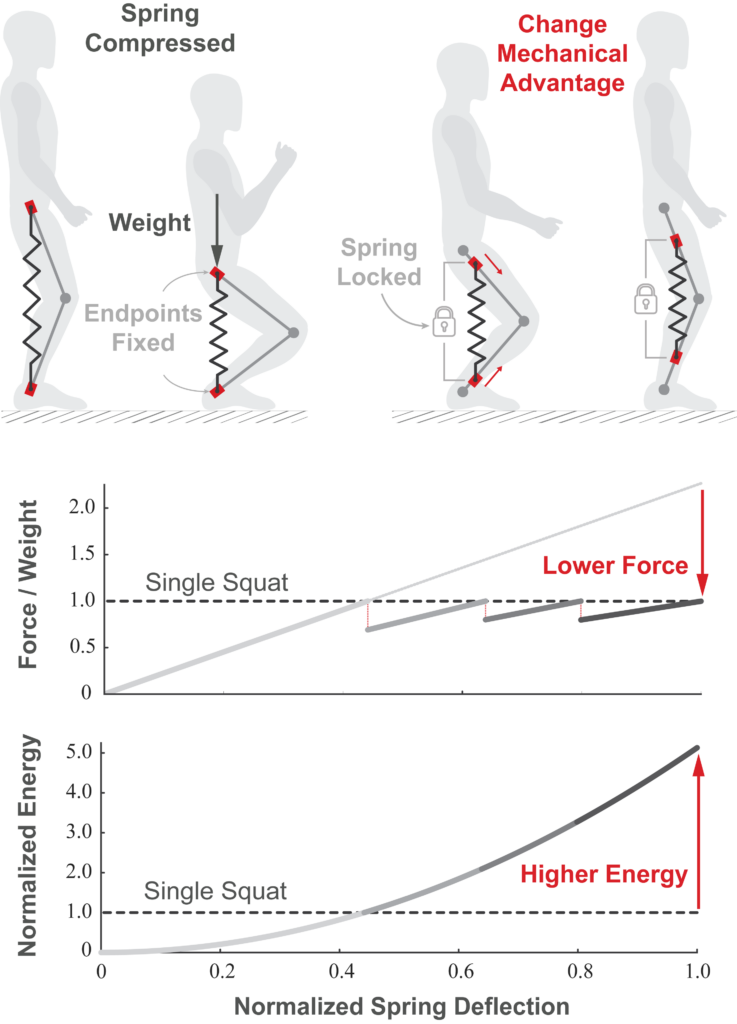
Rethinking Assistive Robotics with Floating Spring Legs
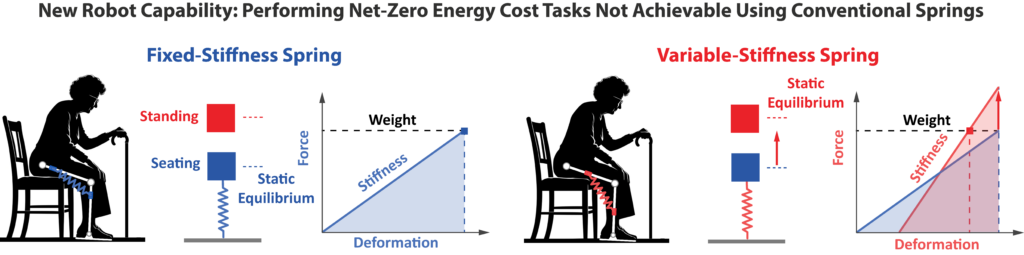
Imagine a spring that adapts to the task at hand, delivering more force without consuming additional energy. The floating spring leg is an innovative variable stiffness mechanism that achieves this by changing stiffness while conserving energy. Demonstrated through a simulated sit-to-stand task, the leg transitions from a low stiffness configuration for energy storage to a high stiffness configuration for force amplification, enabling movements that are otherwise impossible with conventional springs. With applications ranging from assistive devices for the elderly to industrial robots, this technology paves the way for energetically efficient, mechanically adaptive systems.
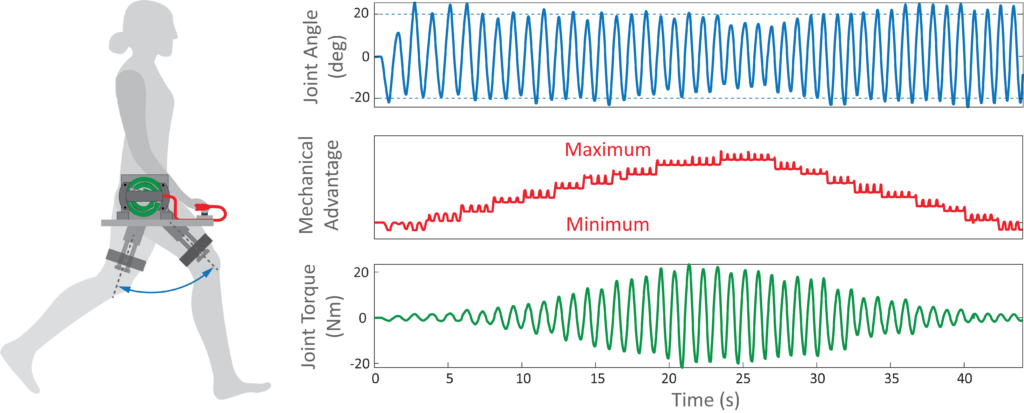
Customizing Assistance with Variable Stiffness Springs
A novel robot joint design enables users to adjust joint stiffness with ease, much like shifting gears on a bicycle. The design allows for adjusting joint stiffness to suit different tasks or user needs, such as walking, running, or other movements. The concept is demonstrated through a leg swing experiment, where hip stiffness was adjusted seamlessly during continuous leg motion. This innovation has the potential to optimize performance in applications such as prosthetics and robotic exoskeletons, offering users greater adaptability and efficiency across activities.
- C. Mathews and D.J. Braun, Design of a Variable Stiffness Spring with Human-Selectable Stiffness, IEEE International Conference on Robotics and Automation, London, United Kingdom, pp. 7385-7390, 2023.
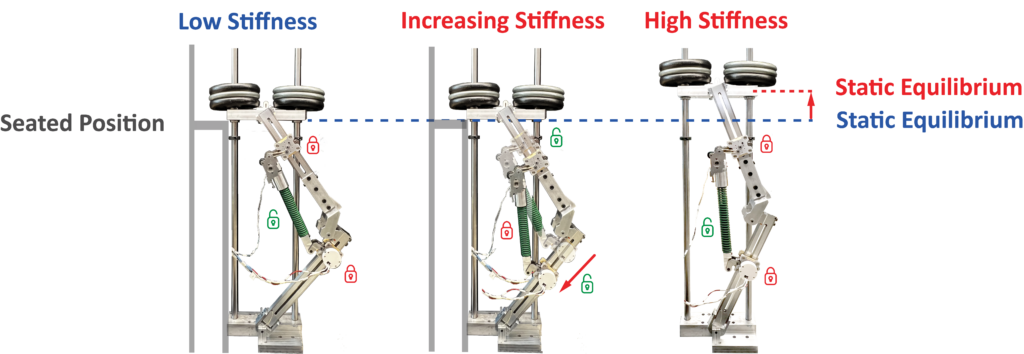
Energy Accumulation via Repeated Squatting
A novel variable stiffness spring design makes it possible to store significant amounts of energy by applying small, repeated forces. Unlike traditional springs, which demand large forces for substantial energy storage, this mechanism decouples the maximum force applied from the energy stored. The concept is demonstrated using an assistive robotic leg that accumulates energy as the user performs repeated squats. This innovation has the potential to unlock new energy storage capabilities for applications such as assistive devices and robotic exoskeletons, paving the way for more efficient and versatile robotic systems.
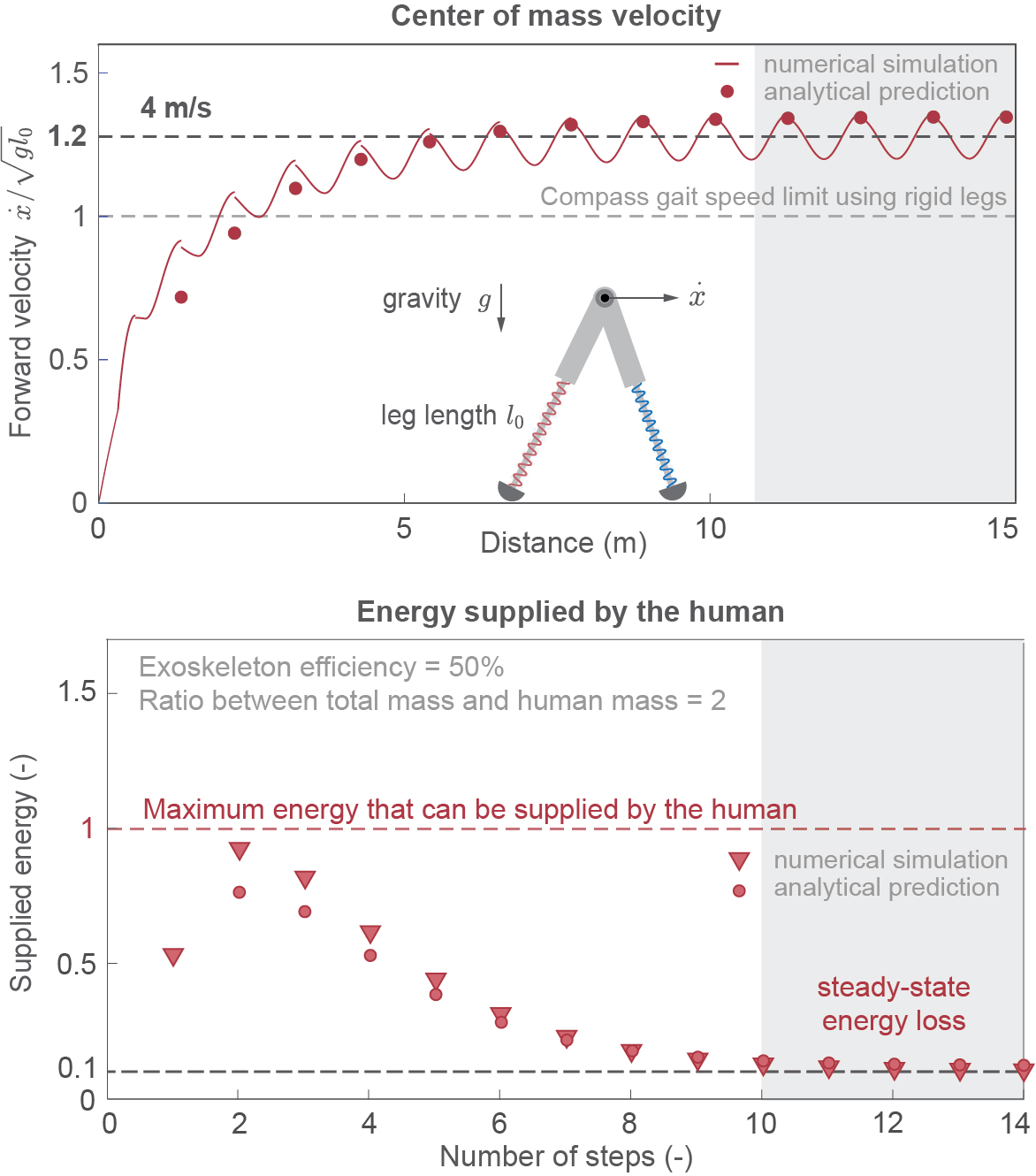
Walking with a Variable Stiffness Spring Leg
This work establishes the theoretical limits of a human-driven robot exoskeleton to reach fast walking speeds with a heavy load. We predict that a variable stiffness spring exoskeleton could enable the user to reach race-walking speeds (4m/s) while carrying one extra body weight.
- T. Zhang and D. Braun, Theory of Fast Walking with Human-Driven Load-Carrying Robot Exoskeletons, IEEE Transactions on Neural Systems and Rehabilitation Engineering, 30, 1971-1981, 2022.
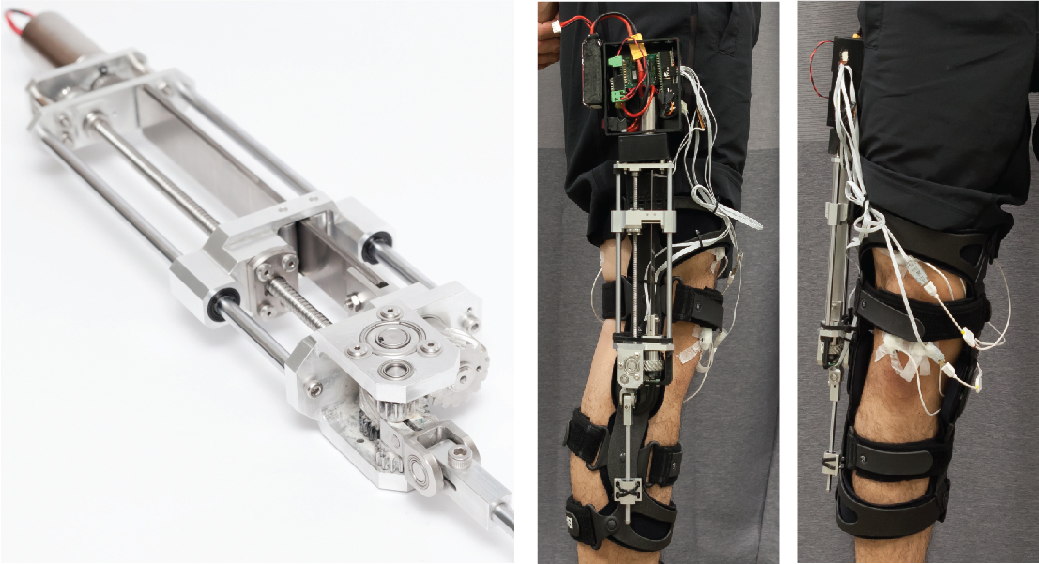
Human Driven Compliant Transmission Mechanism
Energetically-passive robot exoskeletons, mimicking the function of the bicycle, could enable humans to reach previously unprecedented mobility. However, energetically passive robot exoskeletons require a sophisticated mechanism to enable humans to supply energy. In this research, we develop a new type of human-driven compliant transmission mechanism that could enable humans to supply energy when the leg is in the air, store the supplied energy, and release the stored energy when the leg is on the ground.

- T. Zhang and D. Braun , Human Driven Compliant Transmission Mechanism, IEEE International Conference on Robotics and Automation, pp. 7094-7099, Xi’an, China, 2021.
Variable Stiffness Springs for Human Augmentation
Variable stiffness springs are devices that promote a novel means of actuation; they provide spring stiffness modulation at a low energy cost, without deliberately doing net mechanical work. This type of compliant actuator may be used for human augmentation to complement co-contracted antagonistic muscles, and as such, reduce muscle activity and metabolic energy cost. Despite the theoretical appeal of this concept, the practical use of variable stiffness springs remains challenging. This is particularly true for human augmentation which requires a compact, lightweight, and portable variable stiffness spring design. The figure below shows one of our compact, lightweight, and portable variable stiffness spring designs.
- H.-F. Lau, A. Sutrisno, T.H. Chong, and D. Braun, Stiffness Modulator: A Novel Actuator for Human Augmentation, IEEE International Conference on Robotics and Automation, pp. 7742-7748, May, Brisbane, Australia, 2018.
- D. Braun, S. Apte, O. Adiyatov, A. Dahiya, and N. Hogan, Compliant Actuation for Energy Efficient Impedance Modulation, IEEE International Conference on Robotics and Automation, pp. 636-641, May, Stockholm, Sweden, 2016.